探索
データの中から目的のデータを見つけ出すことを探索といいます.ここではそのような探索をデータに応じて効率的に行う探索アルゴリズムについてまとめています.
幅優先探索アルゴリズムや深さ優先探索アルゴリズム、線形探索などを含みます.
2017.9.16
-
161Views
-
0Watch
-
12Knows
-
一つ上へ
-
配列・リストの探索データの配列・リストの中から特に前提知識や予備知識を用いずに探索する方法についてまとめています.主なものに線形探索や二分探索などがあります.
-
グラフの探索データをグラフの形状で表現できているときにそのグラフの中で目的に沿った経路やデータを見つけ出す探索アルゴリズムについてまとめています. 幅優先探索や深さ優先探索などもこれらのグラフ探索の種類で、ダイクストラ方やベルマンフォートなどの最小コスト経路の探索もこの中で紹介します.
-
空間の探索空間の中で解への軌道や解そのものを探索するためのアルゴリズムについてまとめたものです.サンプリングベースのものや空間を分割ベースのものなどがあります.
|
|
探索の新規投稿
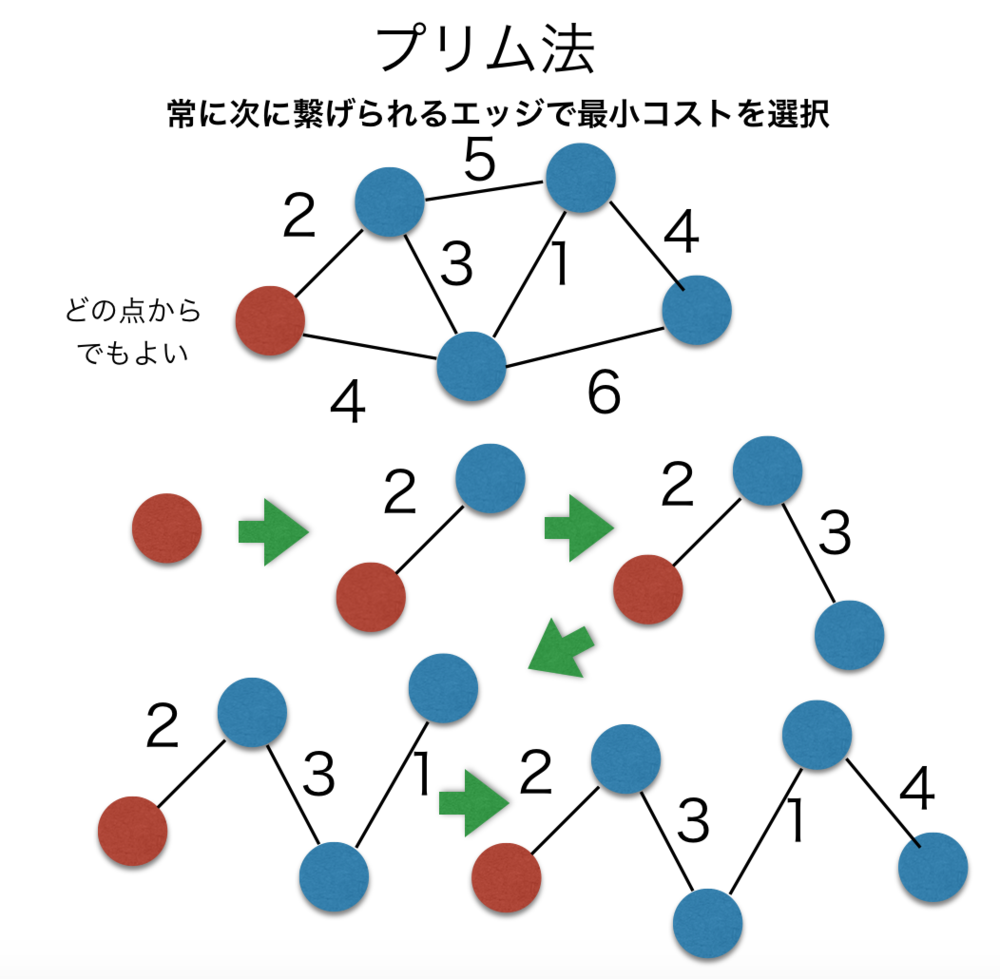
プリム法
プリム法は、最小全域木を求める貪欲法ベースで時間計算量がO(E+V log V)となる探索アルゴリズム.時間計算量は実装方法に依存する.特定の点から始めて常に繋がりうるエッジのうち最小のコストのエッジを選択することを繰り返す.
PV 296
Fav 0
2018.11.07
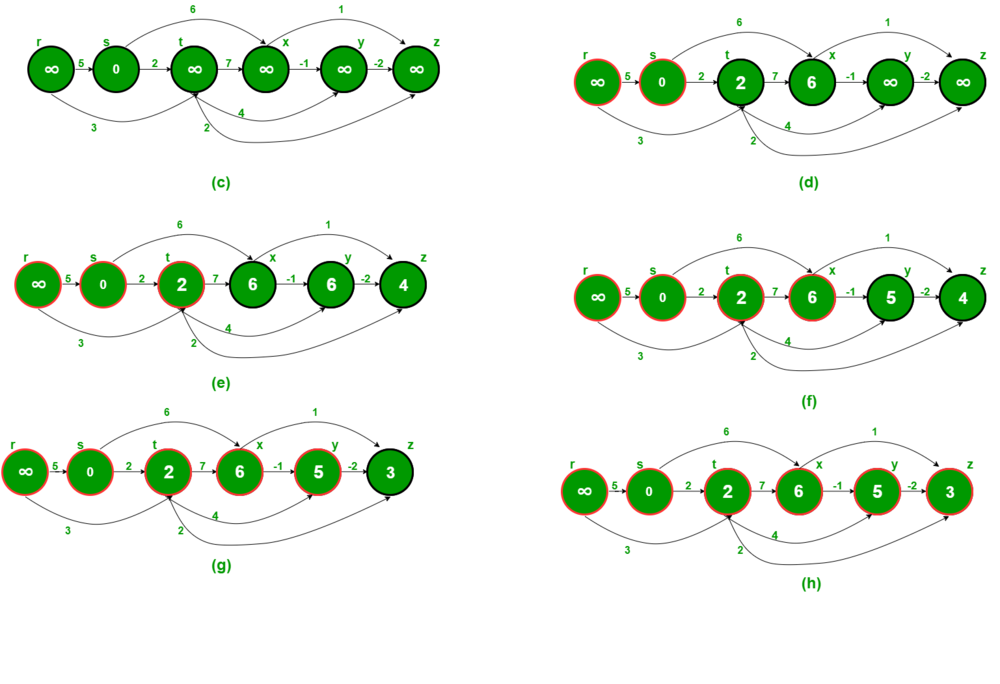
トポロジカルソートのDAG経路探索
有向非循環グラフ(DAG)の最短経路探索を線形時間で探索を行う手法として、トポロジカルソートによるものが挙げられます.一度しかノードもエッジも参照しないため、ソート自体もその後の最短経路探索も線形時間で探索が完了します.
PV 291
Fav 0
2018.10.21
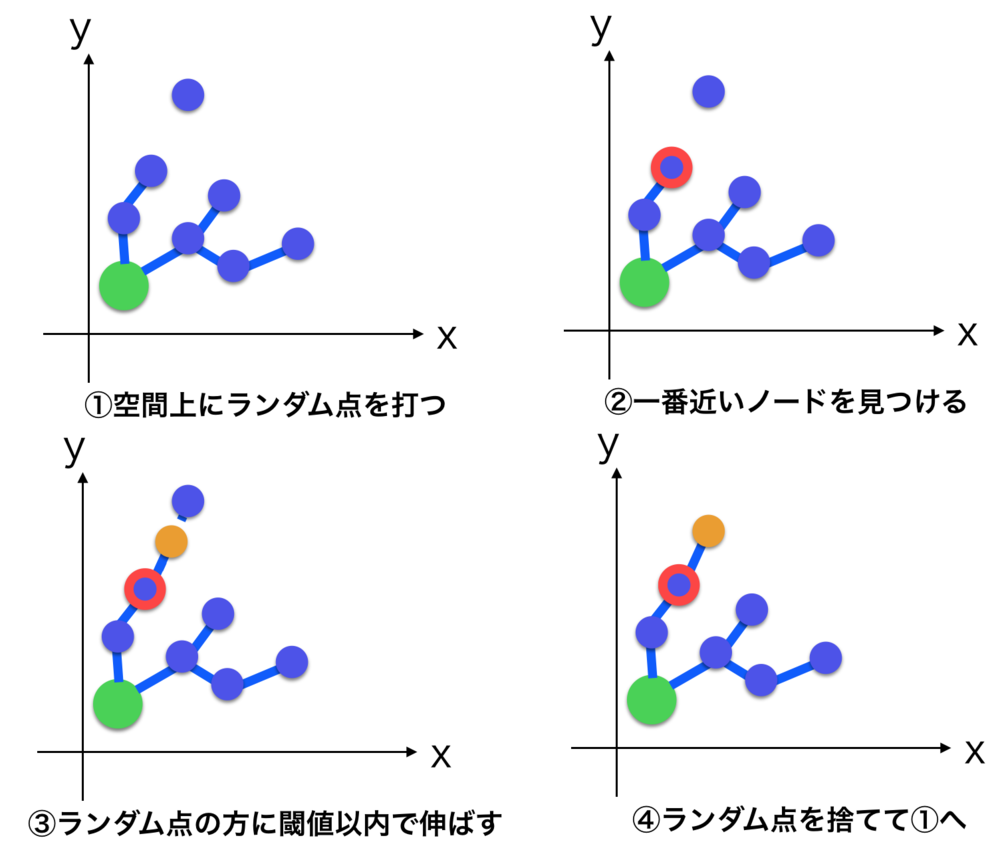
RRT
RRT(Rapidly-exploring Random Tree)は高次元空間における探索を効率的に比較的高速的に行うことのできる探索手法.これを用いて自由度の高いロボットアームの軌道探索や経路探索などが行われることが多い.アルゴリズムがシンプルで実装も容易.
PV 578
Fav 0
2018.10.14
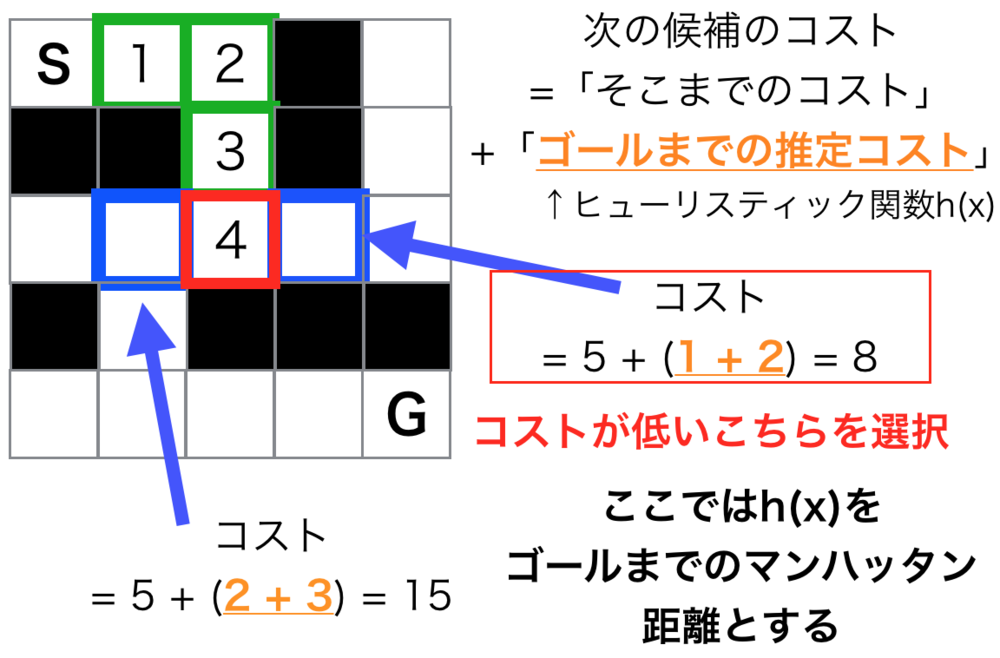
A*探索アルゴリズム
A*探索アルゴリズムは候補のノードのうち「それまでのコスト」+「ゴールまでの推定コスト」が最小になると思われるノードを繰り返し選択していき効率的に最短経路を探索するアルゴリズム.ダイクストラの一般化であり、「ゴールまでの推定コスト」を0にしているのがダイクストラ法.「ゴールまでの推定コスト」は自身で決める必要があり、その質に探索の効率が大きく左右される.
PV 474
Fav 0
2018.08.08
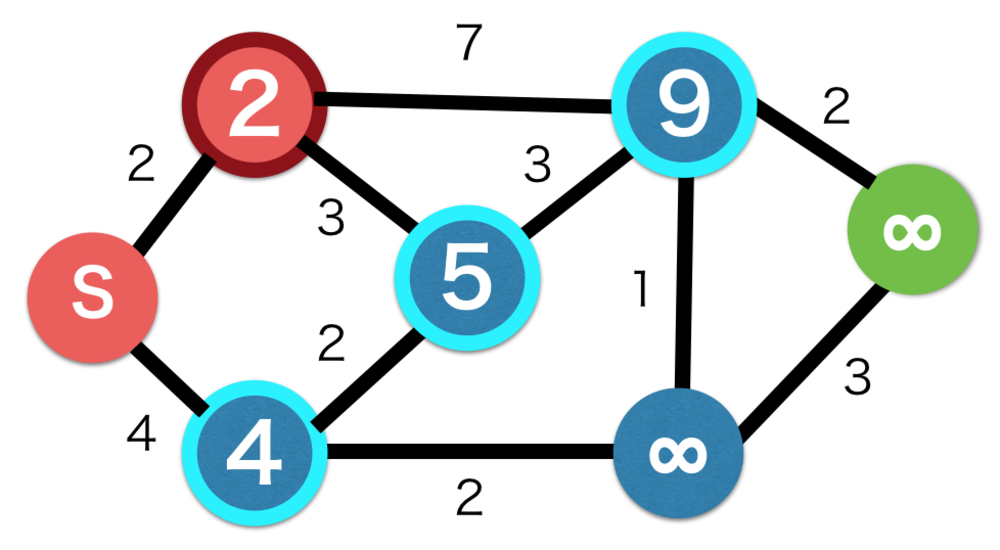
ダイクストラ法
ダイクストラ法は、負のコストがない回路において、ルートを選択を工夫して最短経路を見つけ出していくことで、ベルマンフォード法より効率的に探索することのできるアルゴリズム.普通の実装では計算量はO(n^2)だが、適当なヒープを用いることでO(E+nlog(n))になる.
PV 361
Fav 0
2018.08.08
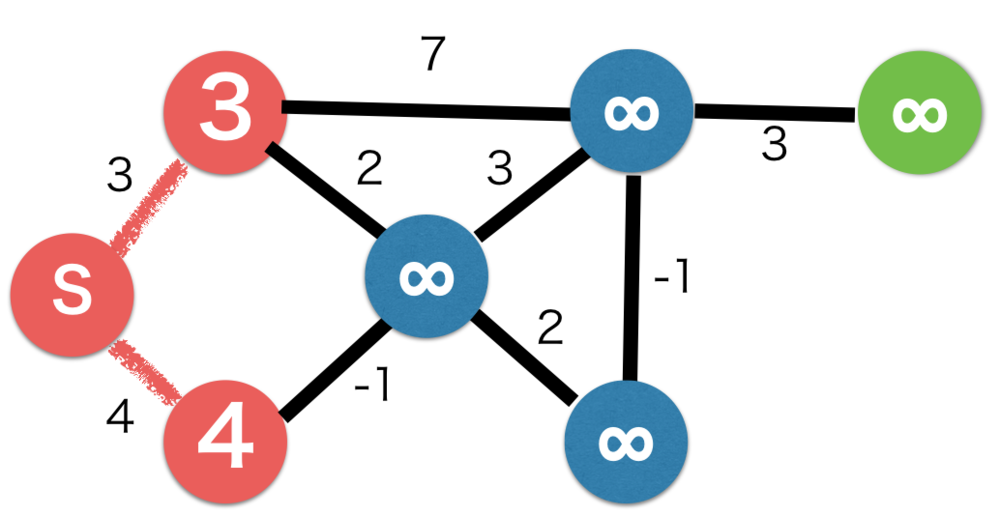
ベルマンフォード法
ベルマンフォード法は、コストがついた辺をもつグラフにおいてある始点からある終点までの最短コストの経路を探索するアルゴリズムです.ベルマンフォードはダイクストラと異なり負の値も扱うことができます.もし一周したコストが負になる箇所があるとそこをぐるぐる回り続けることによっていくらでもコストを避けられるため、そのようなグラフでは解を持ちません.
PV 613
Fav 0
2018.07.24
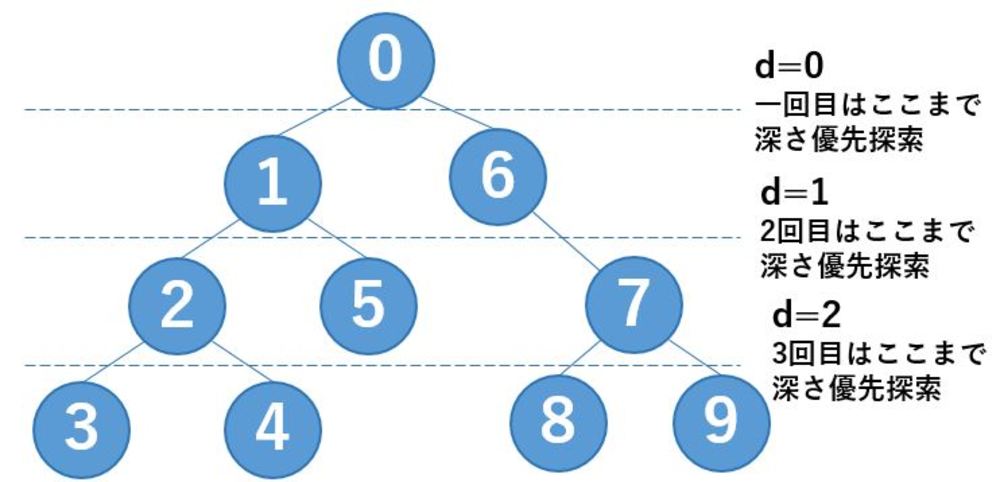
反復深化探索
反復深化探索(反復深化深さ優先探索, ID, Iterative deepening depth-first search)は深さを制限した深さ優先探索を最大深さ0から次第に大きくしながら目的のデータが見つかるまで繰り返す探索.深さ優先のメモリの効率性と幅優先探索の完全性、最適性を備え持っているため、深さ優先探索や幅優先探索よりも理論上優れていることが多い.
PV 1194
Fav 0
2018.07.22
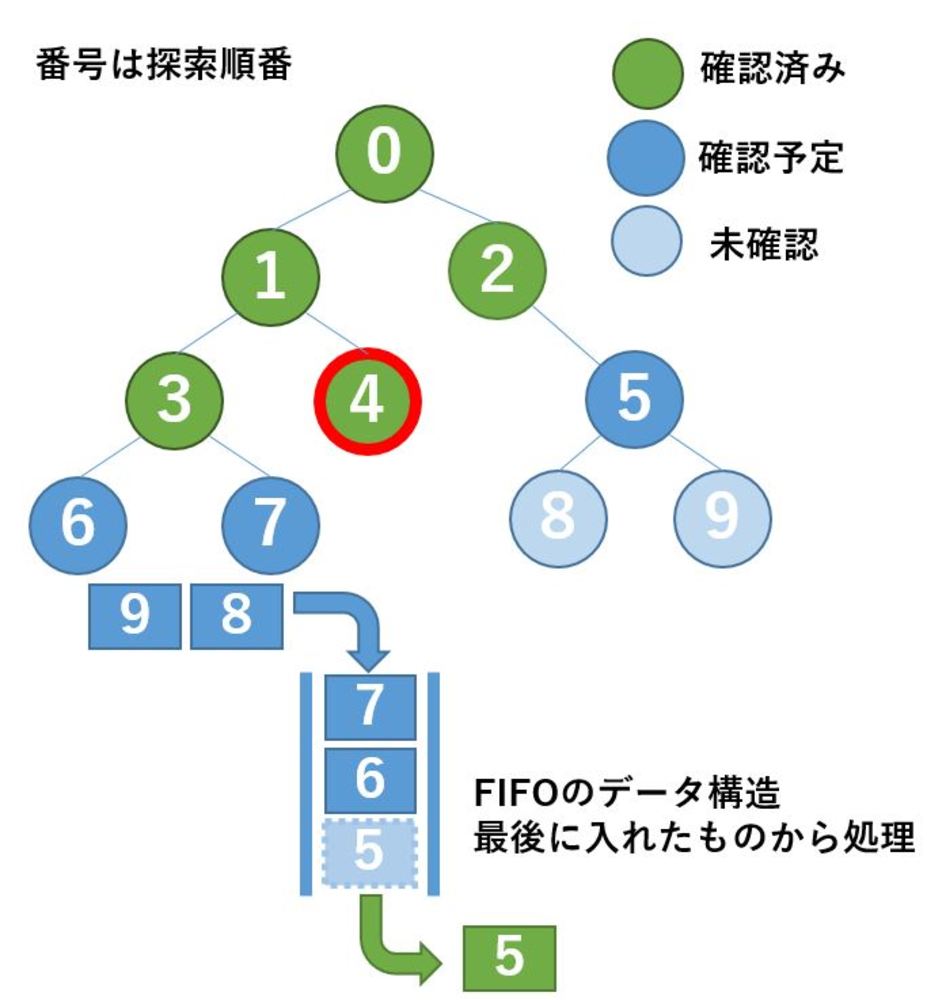
幅優先探索
幅優先探索はグラフデータの中でスタートのデータから浅いデータから探索し、見つからなければ更に深いところで次の候補を探していく探索.今まで見てきたデータを保持するため空間計算量が大きく、頂点数VでO(V)、または深さdと平均分岐数bを用いてO(b^d)と記述できます
PV 215
Fav 0
2018.07.22
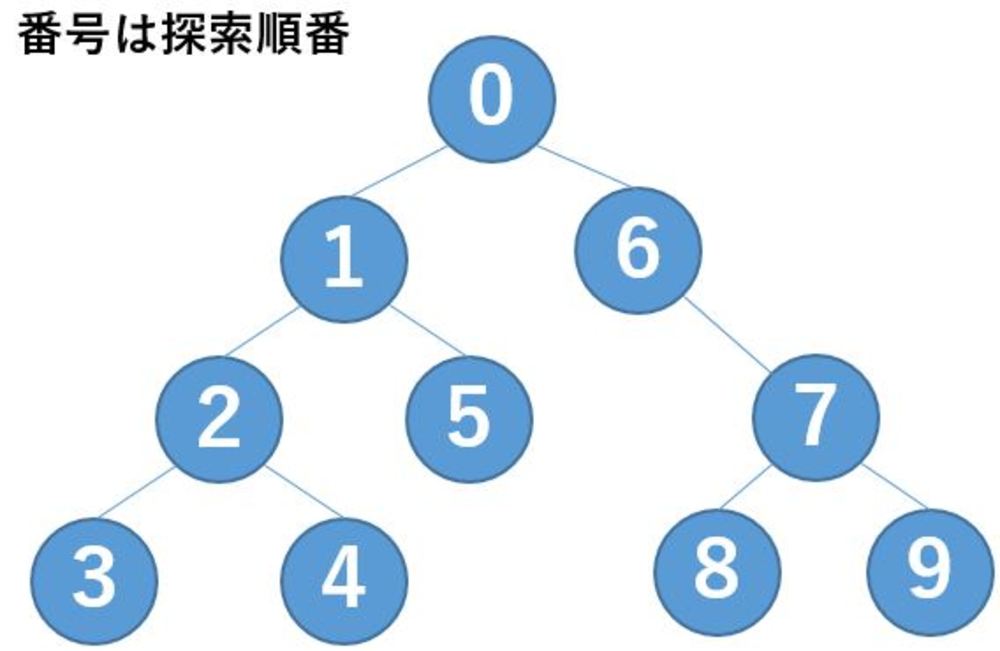
深さ優先探索
深さ優先探索はグラフデータの中でスタートのデータからとりあえずグラフの分岐がなくなるまで探索し、なくなったら少し戻って次の候補を探していく探索.データが深いところにありうる場合には幅優先探索でなくこちらを使用します.際限なく深くなりそうなときは最大深さを決めて途中で打ち切る場合もあります.通常幅優先探索より空間計算量ははるかに小さくなる.
PV 354
Fav 0
2018.07.22
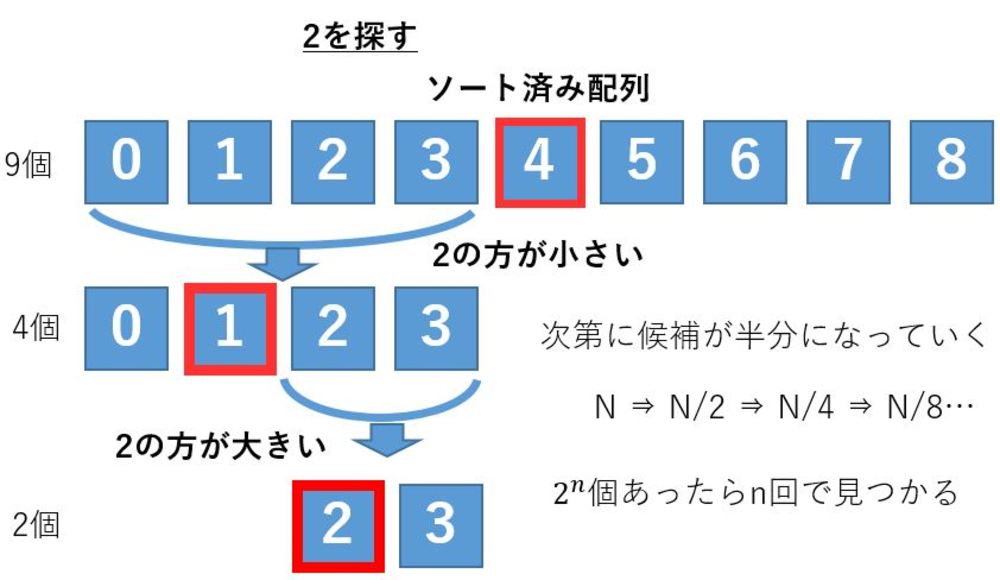
二分探索
二分探索はデータを持つ配列やリストをあらかじめある大きさを基準にソートしておき効率的に探索する手法です.配列の真ん中の値を見てそれが探したい値より大きいか小さいかで対象を絞りこんでいきます.計算量はO(log(n))になります.
PV 356
Fav 0
2018.07.22
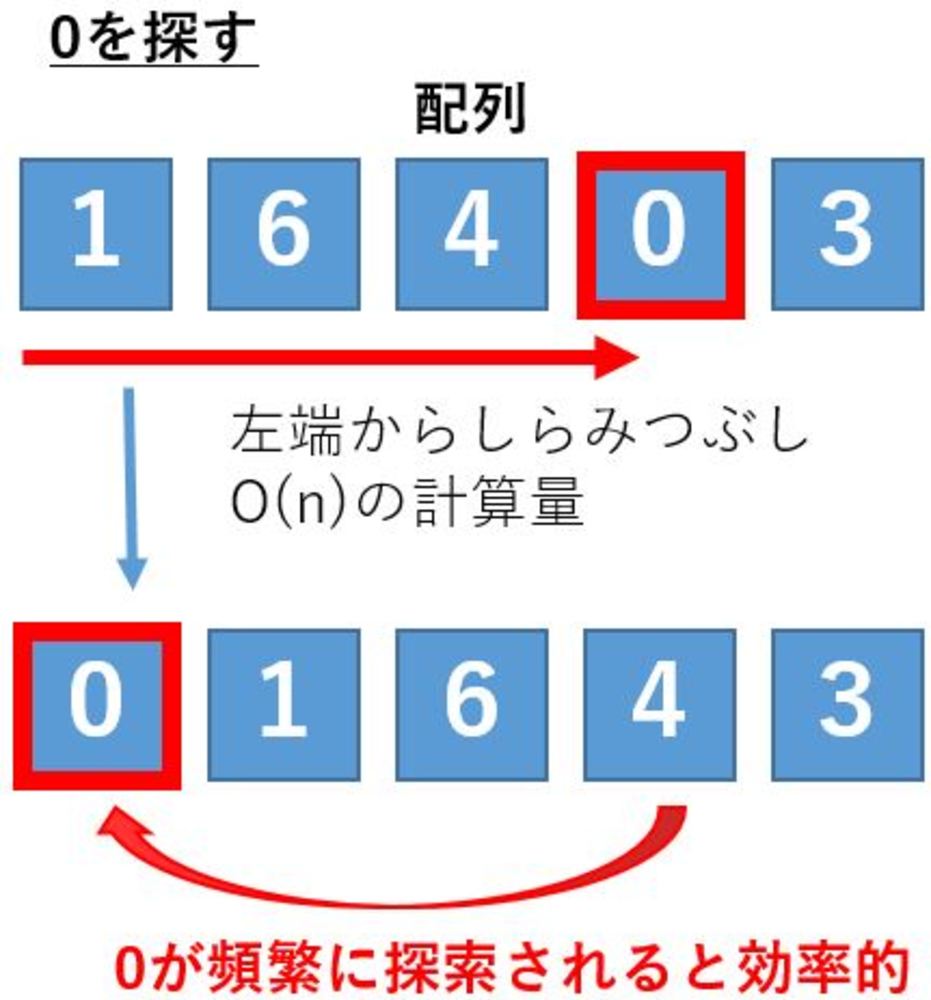
自己組織化探索
自己組織化探索はデータを含む配列やリストなどから線形探索のようなしらみつぶしの探索をした後に見つけ出した要素を配列から削除して先頭に挿入する探索アルゴリズムです.これは複数回探索を行うことで効率的に探索ができるようになっていきます.探索するデータに偏りがありデータによって頻繁に探索されることが前提です.
PV 180
Fav 0
2018.07.22
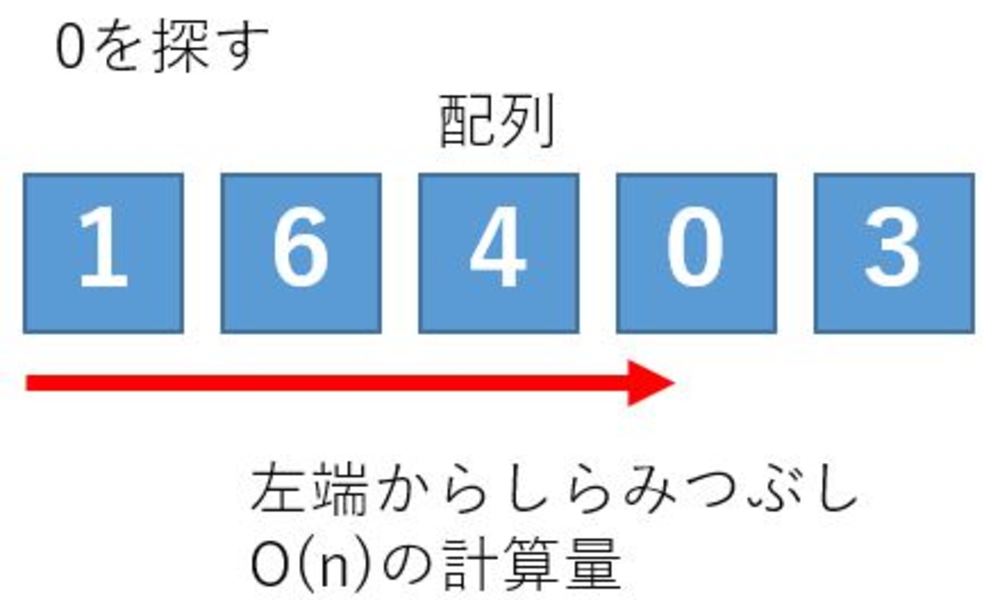
線形探索
線形探索はデータが入っている配列やリストの中から目的の数字をしらみつぶしに全て確認することで探索する最も単純な探索アルゴリムです.特に事前準備は必要ありません.データ数がnのとき探索の計算量はO(n)です.
PV 163
Fav 0
2018.07.22
動的計画法はメモ化をするプログラム全てを指すということでいいのでしょうか
PV 155
Fav 0
2017.10.01
焼きなまし法や山登り法で実際問題どれを使うのがよいのでしょうか?
PV 159
Fav 0
2017.09.30
探索人気知識・質問
反復深化探索
反復深化探索(反復深化深さ優先探索, ID, Iterative deepening depth-first search)は深さを制限した深さ優先探索を最大深さ0から次第に大きくしながら目的のデータが見つかるまで繰り返す探索.深さ優先のメモリの効率性と幅優先探索の完全性、最適性を備え持っているため、深さ優先探索や幅優先探索よりも理論上優れていることが多い.
PV 1194
Fav 0
2018.07.22
ベルマンフォード法
ベルマンフォード法は、コストがついた辺をもつグラフにおいてある始点からある終点までの最短コストの経路を探索するアルゴリズムです.ベルマンフォードはダイクストラと異なり負の値も扱うことができます.もし一周したコストが負になる箇所があるとそこをぐるぐる回り続けることによっていくらでもコストを避けられるため、そのようなグラフでは解を持ちません.
PV 613
Fav 0
2018.07.24
RRT
RRT(Rapidly-exploring Random Tree)は高次元空間における探索を効率的に比較的高速的に行うことのできる探索手法.これを用いて自由度の高いロボットアームの軌道探索や経路探索などが行われることが多い.アルゴリズムがシンプルで実装も容易.
PV 578
Fav 0
2018.10.14
A*探索アルゴリズム
A*探索アルゴリズムは候補のノードのうち「それまでのコスト」+「ゴールまでの推定コスト」が最小になると思われるノードを繰り返し選択していき効率的に最短経路を探索するアルゴリズム.ダイクストラの一般化であり、「ゴールまでの推定コスト」を0にしているのがダイクストラ法.「ゴールまでの推定コスト」は自身で決める必要があり、その質に探索の効率が大きく左右される.
PV 474
Fav 0
2018.08.08
ダイクストラ法
ダイクストラ法は、負のコストがない回路において、ルートを選択を工夫して最短経路を見つけ出していくことで、ベルマンフォード法より効率的に探索することのできるアルゴリズム.普通の実装では計算量はO(n^2)だが、適当なヒープを用いることでO(E+nlog(n))になる.
PV 361
Fav 0
2018.08.08
二分探索
二分探索はデータを持つ配列やリストをあらかじめある大きさを基準にソートしておき効率的に探索する手法です.配列の真ん中の値を見てそれが探したい値より大きいか小さいかで対象を絞りこんでいきます.計算量はO(log(n))になります.
PV 356
Fav 0
2018.07.22
深さ優先探索
深さ優先探索はグラフデータの中でスタートのデータからとりあえずグラフの分岐がなくなるまで探索し、なくなったら少し戻って次の候補を探していく探索.データが深いところにありうる場合には幅優先探索でなくこちらを使用します.際限なく深くなりそうなときは最大深さを決めて途中で打ち切る場合もあります.通常幅優先探索より空間計算量ははるかに小さくなる.
PV 354
Fav 0
2018.07.22
プリム法
プリム法は、最小全域木を求める貪欲法ベースで時間計算量がO(E+V log V)となる探索アルゴリズム.時間計算量は実装方法に依存する.特定の点から始めて常に繋がりうるエッジのうち最小のコストのエッジを選択することを繰り返す.
PV 296
Fav 0
2018.11.07
トポロジカルソートのDAG経路探索
有向非循環グラフ(DAG)の最短経路探索を線形時間で探索を行う手法として、トポロジカルソートによるものが挙げられます.一度しかノードもエッジも参照しないため、ソート自体もその後の最短経路探索も線形時間で探索が完了します.
PV 291
Fav 0
2018.10.21
幅優先探索
幅優先探索はグラフデータの中でスタートのデータから浅いデータから探索し、見つからなければ更に深いところで次の候補を探していく探索.今まで見てきたデータを保持するため空間計算量が大きく、頂点数VでO(V)、または深さdと平均分岐数bを用いてO(b^d)と記述できます
PV 215
Fav 0
2018.07.22
自己組織化探索
自己組織化探索はデータを含む配列やリストなどから線形探索のようなしらみつぶしの探索をした後に見つけ出した要素を配列から削除して先頭に挿入する探索アルゴリズムです.これは複数回探索を行うことで効率的に探索ができるようになっていきます.探索するデータに偏りがありデータによって頻繁に探索されることが前提です.
PV 180
Fav 0
2018.07.22
線形探索
線形探索はデータが入っている配列やリストの中から目的の数字をしらみつぶしに全て確認することで探索する最も単純な探索アルゴリムです.特に事前準備は必要ありません.データ数がnのとき探索の計算量はO(n)です.
PV 163
Fav 0
2018.07.22
焼きなまし法や山登り法で実際問題どれを使うのがよいのでしょうか?
PV 159
Fav 0
2017.09.30
動的計画法はメモ化をするプログラム全てを指すということでいいのでしょうか
PV 155
Fav 0
2017.10.01