ロボットのリンク
ロボットのリンクを行列等で表現することで動力学や静力学での取り扱いを簡単にします.ここではそれらを学ぶ上で必須な表現等を抑えられるようにするページです.
2018.7.11
-
228Views
-
0Watch
-
7Knows
|
|
ロボットのリンクの新規投稿
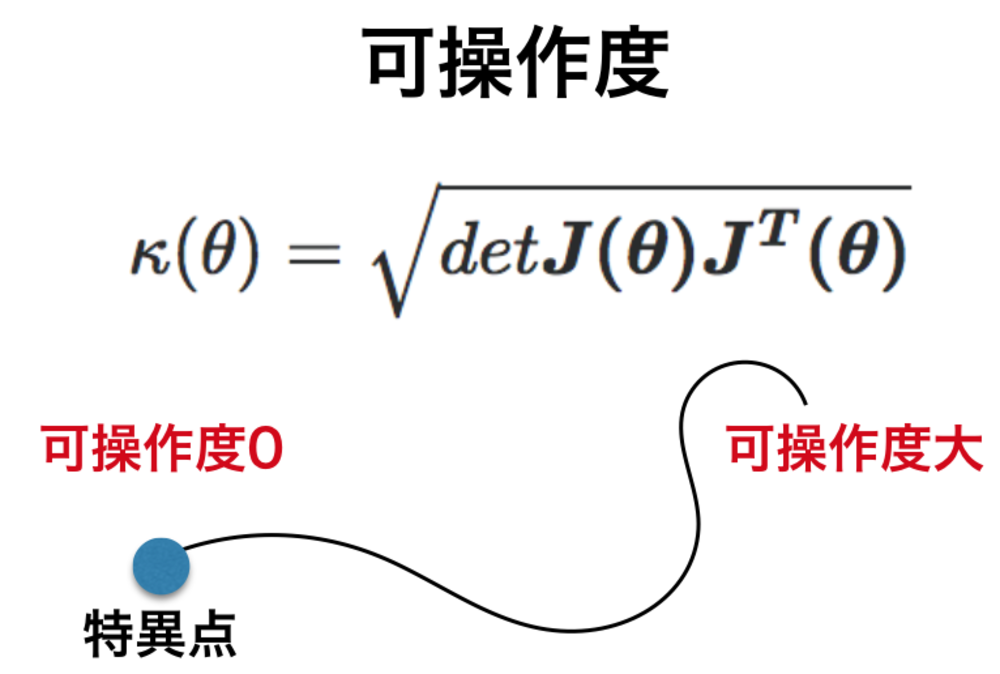
可操作度
可操作度は特異点を避けたいときに指標となる特異点との距離に当たるような数値を求められる.特異点において可操作度の値は0となる.ヤコビ行列Jを用いて求めることが可能.
PV 682
Fav 0
2018.11.04
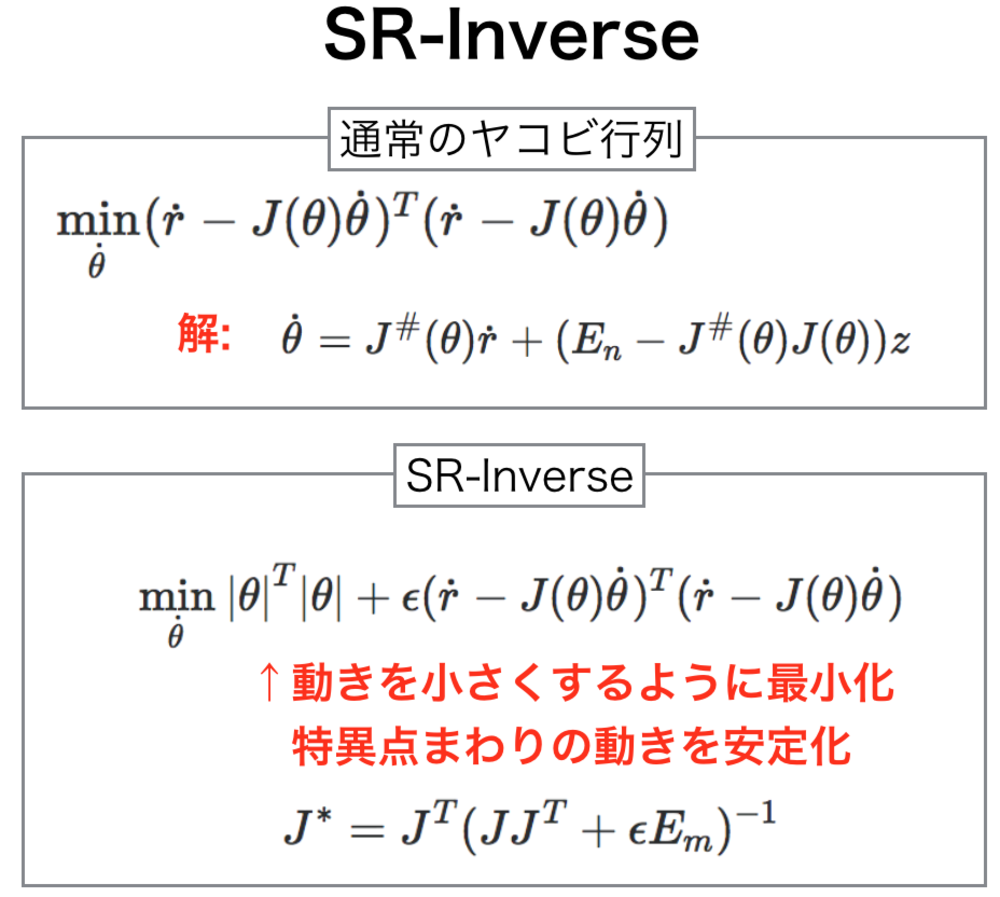
SR-Inverse
SR-Inverse(Singularity-Robust Inverse)は特異点に近くなるにつれてヤコビ行列がフルランクではなくなりロボットの動きが大きくなってしまうのを防ぐために擬似逆行列を別行列に置き換えた逆運動学.特異点まわりを避け大きな運動をしないようにすることが可能.
PV 590
Fav 0
2018.10.30
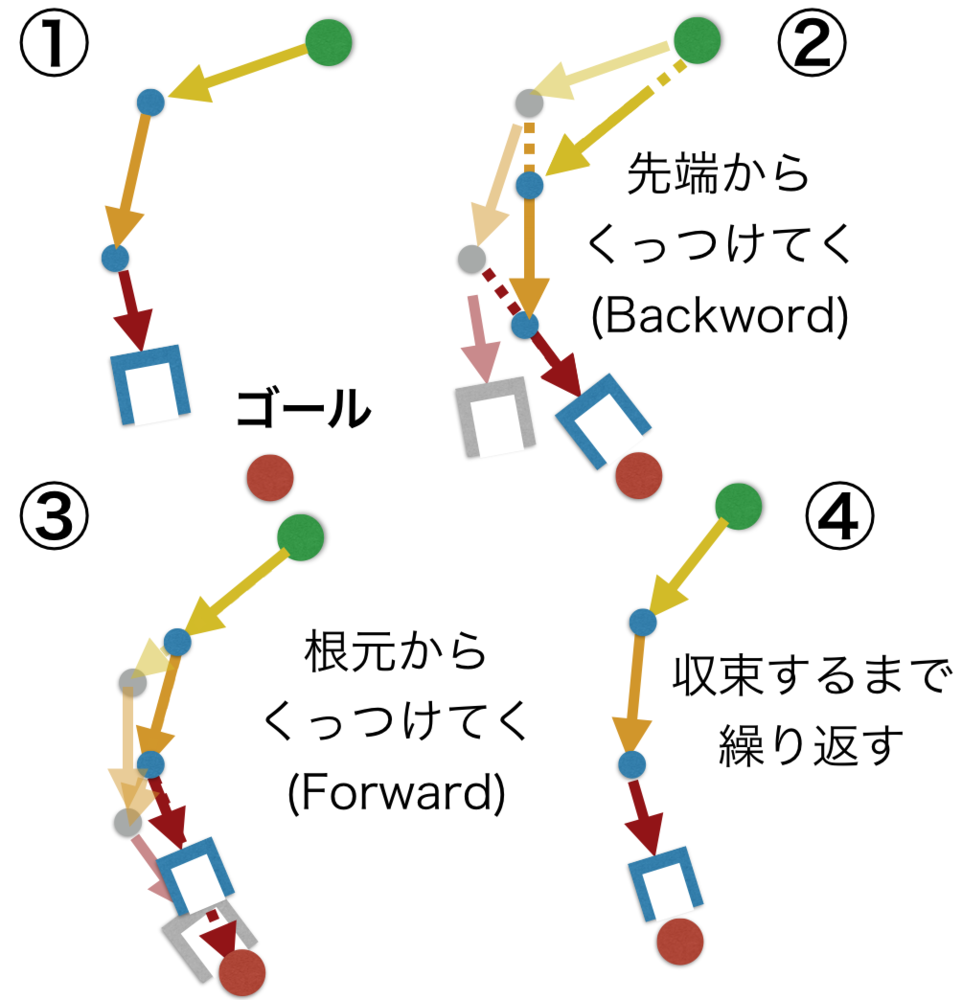
FABRIKによる逆運動学
FABRIK IK(Forward And Backward Reaching inverse kinematics)は、根元と先端を交互に基準として繰り返しながら関節角度を調整していくことで、逆運動学の解を得る.アルゴリズムはシンプルで、実装も容易い.
PV 964
Fav 0
2018.09.06
CCDによる逆運動学
Cyclic-Coordinate-Descent法(CCD法)を用いた逆運動学についてまとめます.CCDでは単純な計算を繰り返していくことで手先位置に合う関節角度を求めることができます.手先位置の姿勢は指定できずあくまで位置のみ合わせにいきますが、軽量なアルゴリズムです.CCDでも局所最適解にはまるケースがあります.
PV 406
Fav 0
2018.07.17
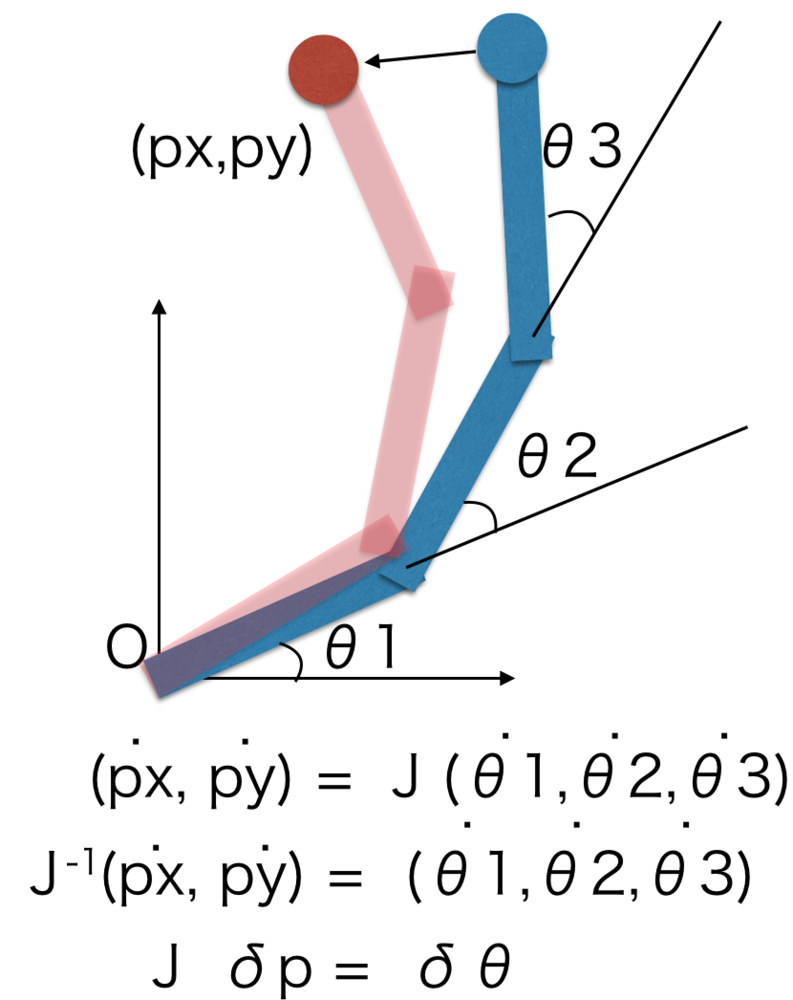
ヤコビ行列による逆運動学
関節角度と手先位置のp=f(θ)の関係からδθ=J^-1()δp(Jはヤコビ行列)を導きこの勾配を利用して近似的に関節角を探索する方法についてまとめます.一般的に逆運動学は解析的に解けないため、このような繰り返し計算による解の導出を行います.ヤコビ行列による逆運動学はその中でも最も有名な手法です.
PV 2519
Fav 0
2018.07.17
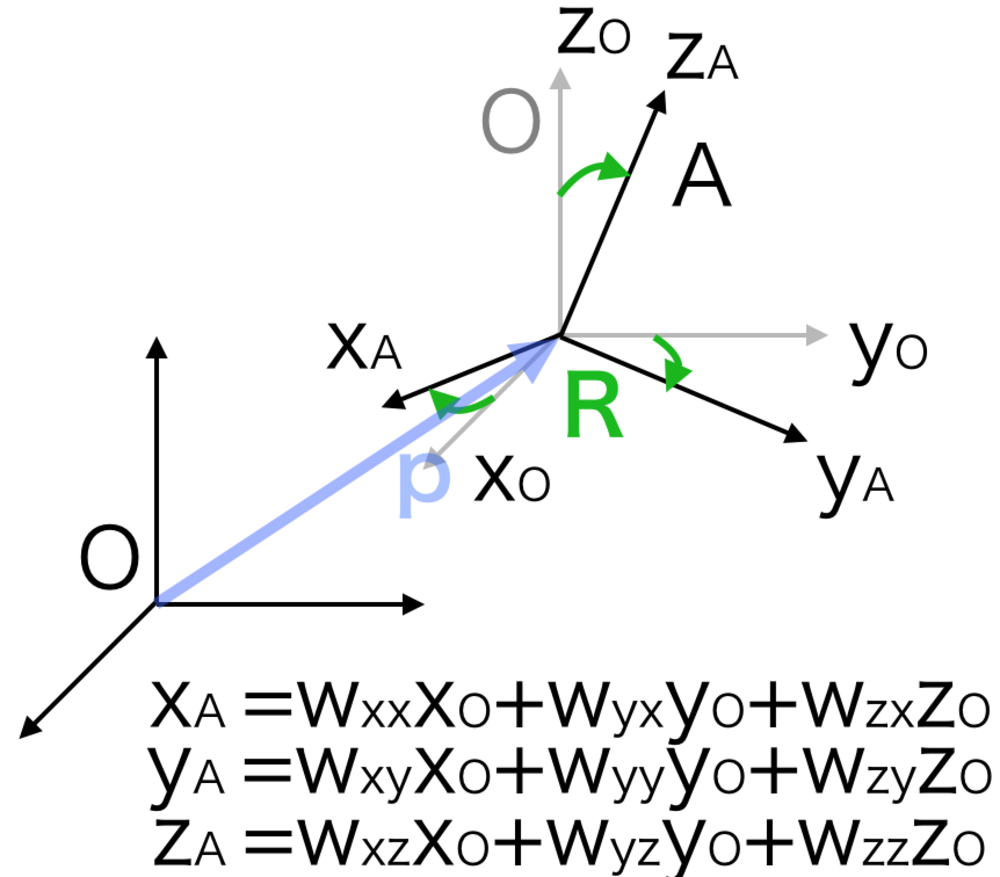
姿勢変換行列
ある座標系の姿勢を表現できればロボットのリンクや座標系の回転を記述する際に利用できる.姿勢変換行列は、行列の形である座標系の別座標系を基準としたときの回転を表現したもの.回転行列とも呼ばれる.
PV 951
Fav 0
2018.07.11
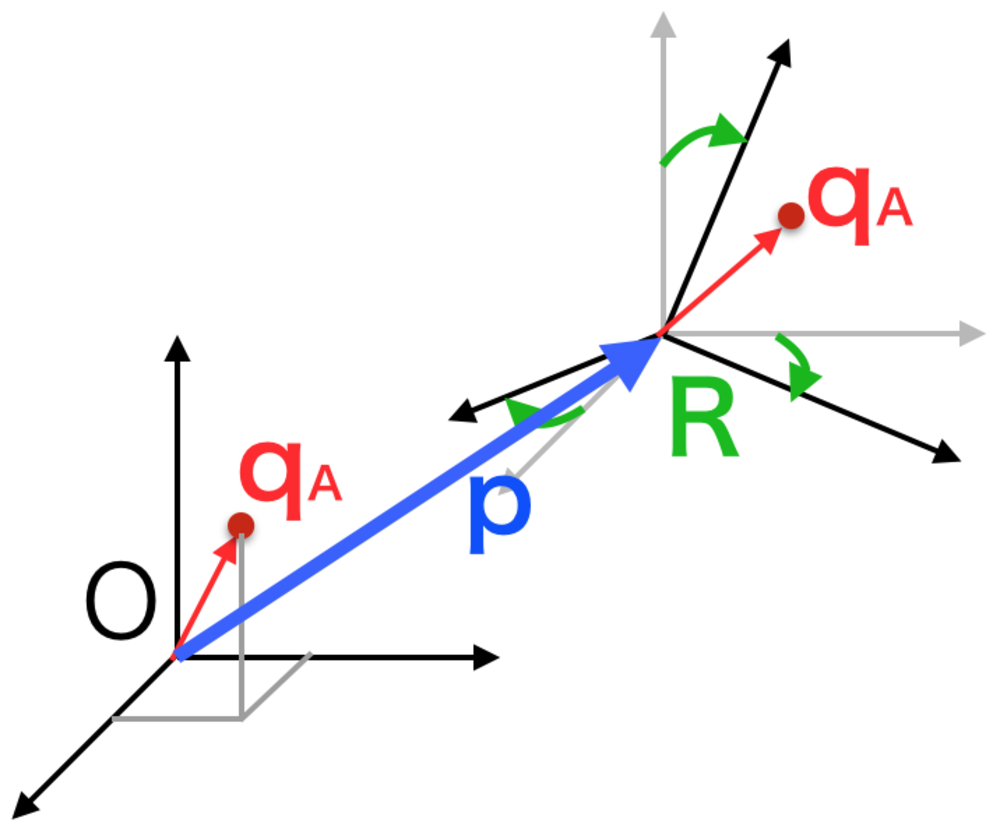
同次変換行列
リンクの位置と回転を同次に表現して動力学や運動学での扱いを簡単にします.位置と回転とを一つの行列にまとめ上げ4x4の行列にしたものを同次変換行列と呼びます.複数の変換を行いたい場合はそれら行列の積をとることで変換が容易に求まります.
PV 5758
Fav 0
2018.07.11
ロボットのリンク人気知識・質問
同次変換行列
リンクの位置と回転を同次に表現して動力学や運動学での扱いを簡単にします.位置と回転とを一つの行列にまとめ上げ4x4の行列にしたものを同次変換行列と呼びます.複数の変換を行いたい場合はそれら行列の積をとることで変換が容易に求まります.
PV 5758
Fav 0
2018.07.11
ヤコビ行列による逆運動学
関節角度と手先位置のp=f(θ)の関係からδθ=J^-1()δp(Jはヤコビ行列)を導きこの勾配を利用して近似的に関節角を探索する方法についてまとめます.一般的に逆運動学は解析的に解けないため、このような繰り返し計算による解の導出を行います.ヤコビ行列による逆運動学はその中でも最も有名な手法です.
PV 2519
Fav 0
2018.07.17
FABRIKによる逆運動学
FABRIK IK(Forward And Backward Reaching inverse kinematics)は、根元と先端を交互に基準として繰り返しながら関節角度を調整していくことで、逆運動学の解を得る.アルゴリズムはシンプルで、実装も容易い.
PV 964
Fav 0
2018.09.06
姿勢変換行列
ある座標系の姿勢を表現できればロボットのリンクや座標系の回転を記述する際に利用できる.姿勢変換行列は、行列の形である座標系の別座標系を基準としたときの回転を表現したもの.回転行列とも呼ばれる.
PV 951
Fav 0
2018.07.11
可操作度
可操作度は特異点を避けたいときに指標となる特異点との距離に当たるような数値を求められる.特異点において可操作度の値は0となる.ヤコビ行列Jを用いて求めることが可能.
PV 682
Fav 0
2018.11.04
SR-Inverse
SR-Inverse(Singularity-Robust Inverse)は特異点に近くなるにつれてヤコビ行列がフルランクではなくなりロボットの動きが大きくなってしまうのを防ぐために擬似逆行列を別行列に置き換えた逆運動学.特異点まわりを避け大きな運動をしないようにすることが可能.
PV 590
Fav 0
2018.10.30
CCDによる逆運動学
Cyclic-Coordinate-Descent法(CCD法)を用いた逆運動学についてまとめます.CCDでは単純な計算を繰り返していくことで手先位置に合う関節角度を求めることができます.手先位置の姿勢は指定できずあくまで位置のみ合わせにいきますが、軽量なアルゴリズムです.CCDでも局所最適解にはまるケースがあります.
PV 406
Fav 0
2018.07.17