-
 @ThothChildren
@ThothChildren
- 2018.7.11
- PV 5759
同次変換行列
ー 概要 ー
リンクの位置と回転を同次に表現して動力学や運動学での扱いを簡単にします.位置と回転とを一つの行列にまとめ上げ4x4の行列にしたものを同次変換行列と呼びます.複数の変換を行いたい場合はそれら行列の積をとることで変換が容易に求まります.



この章を学ぶ前に必要な知識
条件
- 移動する移動量と変換する回転座標が必要
- 順序は、移動を原点座標で先にしてその後回転
ポイント
- 同次変換行列によって必要な座標変換が求まる
- 複数の変換行列の積によってそれらの合成した変換を得られる
- 同次変換行列の逆行列は容易に求まる
解 説
すぐにポイントを抑えられるわかりやすい同時変換行列の解説動画 | |
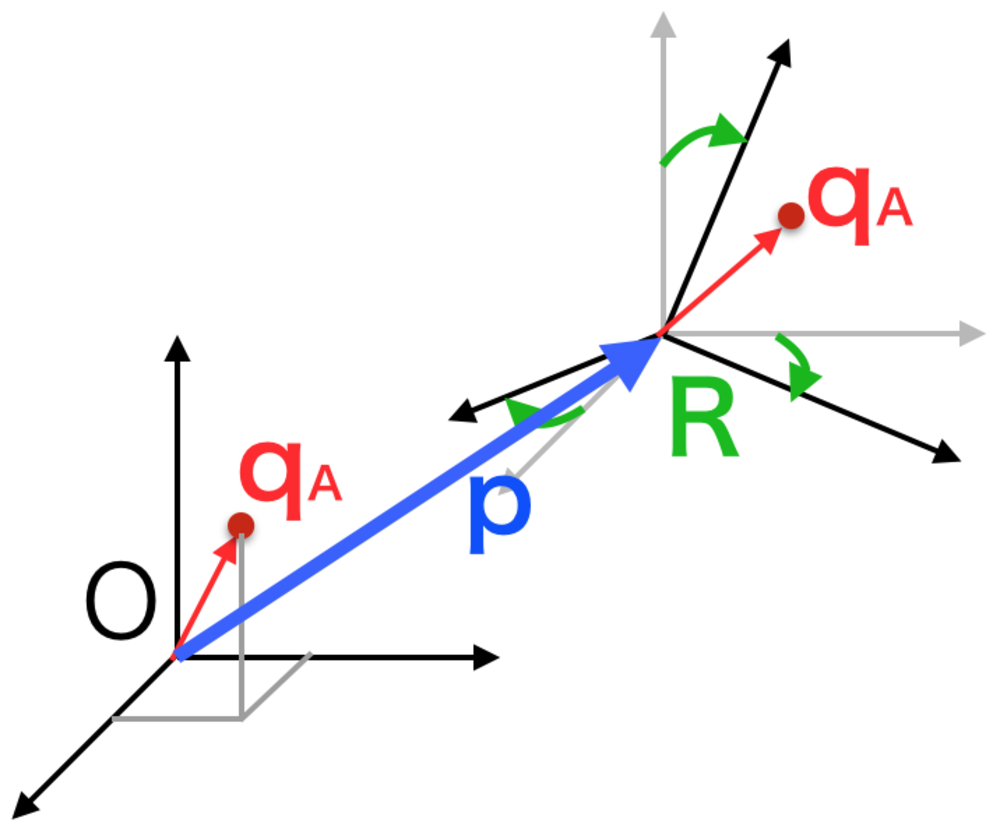
基準の原点座標系Oにおいて、ある座標系AがありそのqAの位置にA座標系に固定された点Qがあるとする.
座標系Aを原点座標系Oでpだけ移動して、原点座標系Oに対してRだけ回転させたときを考える.
そうすると、座標系と一緒に移動する点Qの原点座標系における位置qOは以下のように書ける.
$$q_O=p_O + R_{OA}q_A$$
これを行列の形で記述すれば、以下の形で表現できる.
$$
\left(
\begin{array}{c}
q_O \\
1
\end{array}
\right) =
\begin{eqnarray}
\left(
\begin{array}{ccc|c}
& & & \\
& R_{OA} & & p_O \\
& & & \\
\hline
0 & 0 & 0 & 1 \\
\end{array}
\right)
\end{eqnarray}
\left(
\begin{array}{c}
q_A \\
1
\end{array}
\right)
=H_{OA}
\left(
\begin{array}{c}
q_A \\
1
\end{array}
\right)
$$
この\(H_{OA}\)を同次変換行列と呼ぶ.この行列は座標系Aの位置と姿勢の情報を持っており、座標系に剛体があれば、剛体の位置と姿勢を持っていることになる. | 同次変換行列とは |
| 同次変換行列の図示
qAはローカルな座標系での座標で原点座標系Oの座標ではない. |
同次変換行列を複数掛け合わせることによって、連鎖したような座標変換を表現することができる.
例えば、先の座標系Aの中で\(q_A\)が実は別の座標系B内の固定点Xをすでに移動して回転してA座標系で算出したものと考えれば
$$\left(
\begin{array}{c}
q_A \\
1
\end{array}
\right) = H_{AB}
\left(
\begin{array}{c}
q_B \\
1
\end{array}
\right) $$
の形で表現できるはず.
これを初めの式に代入すれば、
$$\left(
\begin{array}{c}
q_O \\
1
\end{array}
\right) =
H_{OA}
H_{AB}
\left(
\begin{array}{c}
q_A \\
1
\end{array}
\right)= \begin{eqnarray}
\left(
\begin{array}{ccc|c}
& & & \\
& R_{OA}R_{AB} & & R_{OA}p_A+p_O \\
& & & \\
\hline
0 & 0 & 0 & 1 \\
\end{array}
\right)
\end{eqnarray}
\left(
\begin{array}{c}
q_A \\
1
\end{array}
\right) $$
と記述できる.\(R_{OA}R_{AB}\)は回転行列同士の積なので回転行列になります.位置座標も同様に位置座標を表します.
そのため上記は
$$\left(
\begin{array}{c}
q_O \\
1
\end{array}
\right) =
H_{OB}
\left(
\begin{array}{c}
q_A \\
1
\end{array}
\right)$$
と書き直すことができ、X座標系までの座標変換を行っていれば、
$$H_{OX} = H_{OA} H_{AB} \dots H_{WX}$$
Hは直行行列ではありません. | 複数の同次変換行列の積 |
Hが以下のように書けるとすると
$$H =\begin{eqnarray}\left(
\begin{array}{ccc|c}
& & & \\
& R& & p \\
& & & \\
\hline
0 & 0 & 0 & 1 \\
\end{array}\right)\end{eqnarray}$$
Hの逆行列は常に以下のように記述できる.
$$H^{-1} =\begin{eqnarray}\left(
\begin{array}{ccc|c}
& & & \\
& R^T& & -R^Tp \\
& & & \\
\hline
0 & 0 & 0 & 1 \\
\end{array}\right)\end{eqnarray}$$
確認するために積を計算すると
$$HH^{-1} =\begin{eqnarray}\left(
\begin{array}{ccc|c}
& & & \\
& RR^T& & -RR^Tp+p \\
& & & \\
\hline
0 & 0 & 0 & 1 \\
\end{array}\right)\end{eqnarray} =E$$
\(RR^T\)は回転行列は常に直交行列で、直交行列は常に以下の関係が成り立つため、上記の式が単位行列となる.
$$RR^T = E $$ | 同次変換行列の逆行列 |
この章を学んで新たに学べる
Comments