Thoth Children
ログイン
知識投稿
他サービス
Thothnator
Thoth Coworker
ウジャトで理解する学問
You Only Search Once(β)
Thoth Hieroglyph
ヒエログリフ変換
ロボットのリンクの数学的基礎
編集
ロボットのリンク表現に関連した数学的基礎の準備を行うためのページです.リンク同士の表現やリンクが連なった時の計算、チェーンルール等について抑えます.
編集
2018.7.11
153
Views
0
Watch
2
Knows
Watch登録
知識登録
削除申請
一つ上へ
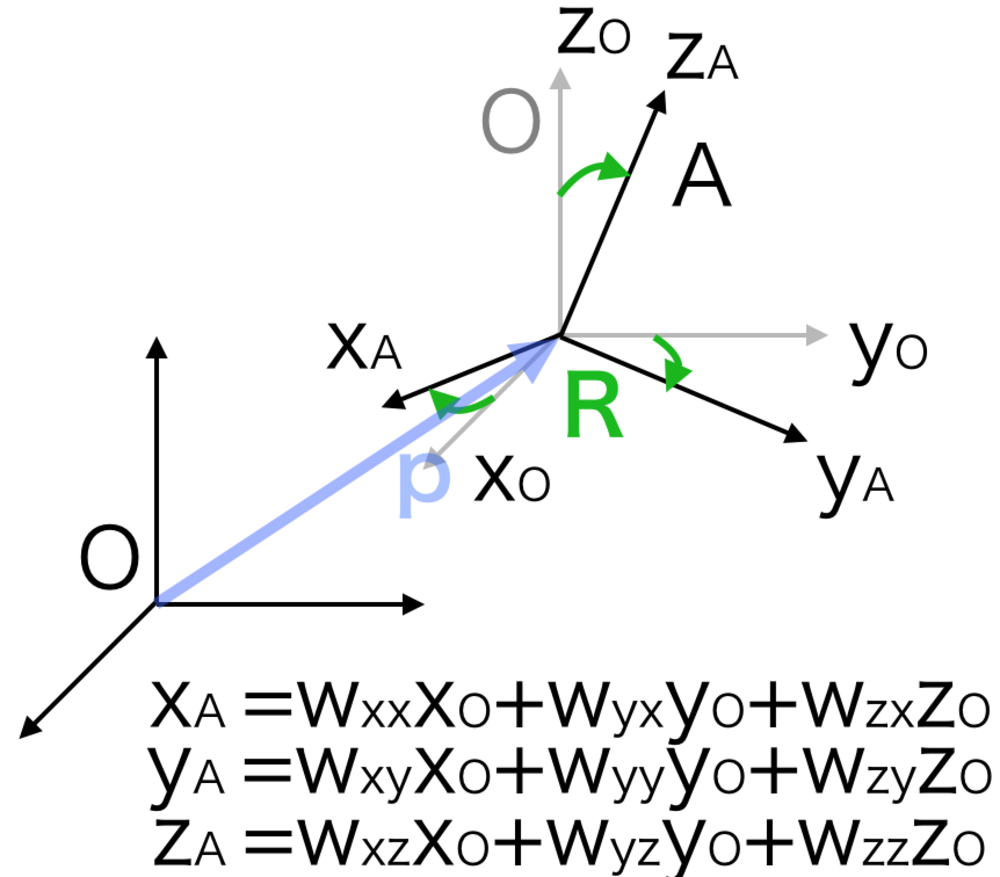
姿勢変換行列
ある座標系の姿勢を表現できればロボットのリンクや座標系の回転を記述する際に利用できる.姿勢変換行列は、行列の形である座標系の別座標系を基準としたときの回転を表現したもの.回転行列とも呼ばれる.
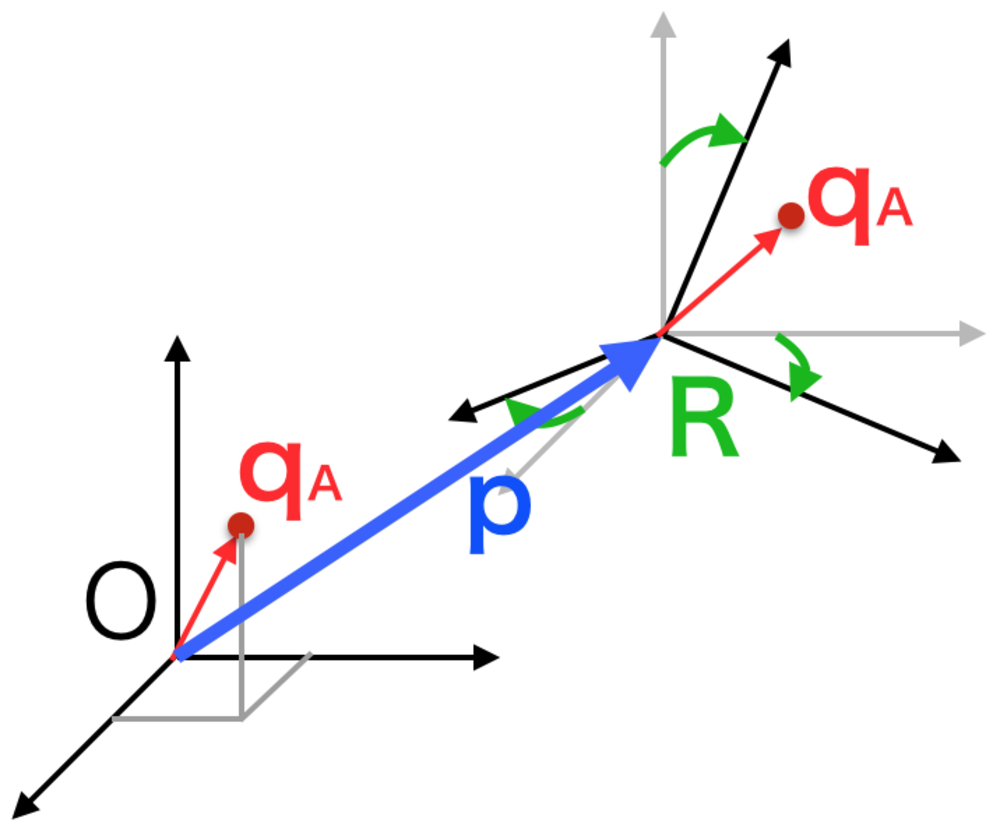
同次変換行列
リンクの位置と回転を同次に表現して動力学や運動学での扱いを簡単にします.位置と回転とを一つの行列にまとめ上げ4x4の行列にしたものを同次変換行列と呼びます.複数の変換を行いたい場合はそれら行列の積をとることで変換が容易に求まります.
×
新しい分野を追加
×
新しい知識を追加
×
分野の削除申請
×
移動または削除を行うには理由を申請ください。
理由
他の分野の移動の場合は分野を設定してください。 削除要請される場合はそのまま下のボタンを押下してください.
分野:
学問
技術
言語
高校
中学
一般
物性
道具
思考
計算
アルゴ
その他
分野の説明を編集
×
分野のタイトルを編集
×
ロボットのリンクの数学的基礎の新規投稿
姿勢変換行列
ある座標系の姿勢を表現できればロボットのリンクや座標系の回転を記述する際に利用できる.姿勢変換行列は、行列の形である座標系の別座標系を基準としたときの回転を表現したもの.回転行列とも呼ばれる.
PV
951
Fav
0
2018.07.11
同次変換行列
リンクの位置と回転を同次に表現して動力学や運動学での扱いを簡単にします.位置と回転とを一つの行列にまとめ上げ4x4の行列にしたものを同次変換行列と呼びます.複数の変換を行いたい場合はそれら行列の積をとることで変換が容易に求まります.
PV
5758
Fav
0
2018.07.11
ロボットのリンクの数学的基礎人気知識・質問
同次変換行列
リンクの位置と回転を同次に表現して動力学や運動学での扱いを簡単にします.位置と回転とを一つの行列にまとめ上げ4x4の行列にしたものを同次変換行列と呼びます.複数の変換を行いたい場合はそれら行列の積をとることで変換が容易に求まります.
PV
5758
Fav
0
2018.07.11
姿勢変換行列
ある座標系の姿勢を表現できればロボットのリンクや座標系の回転を記述する際に利用できる.姿勢変換行列は、行列の形である座標系の別座標系を基準としたときの回転を表現したもの.回転行列とも呼ばれる.
PV
951
Fav
0
2018.07.11