-
 @ThothChildren
@ThothChildren
- 2018.10.14
- PV 382
タスク空間
ー 概要 ー
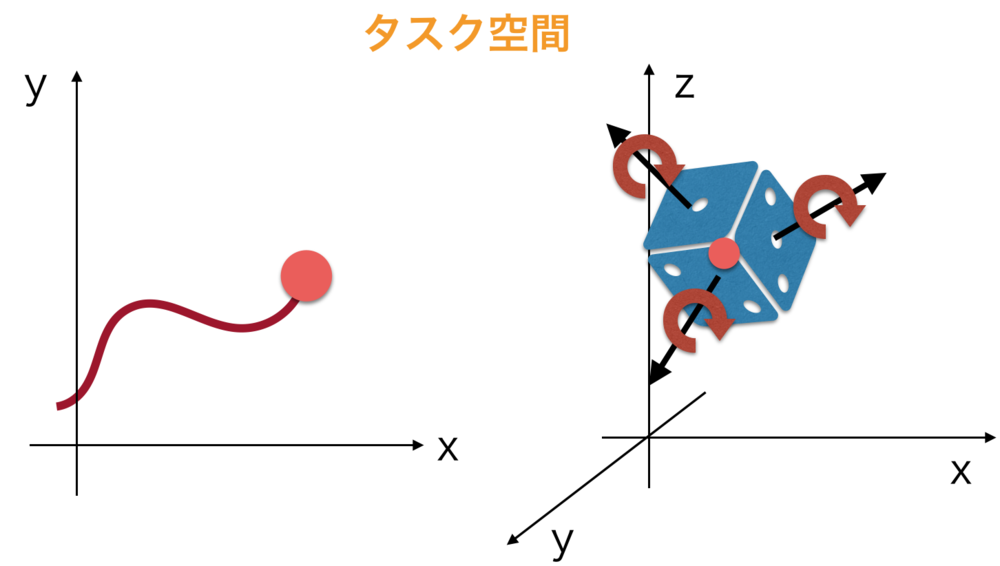
タスク空間は、ロボット工学においてタスクを表現する上でもっとも自然な座標系を用いて表現した空間のこと.例えばある軌道でボールを動かしたいときは、(x,y,z)の座標系、剛体の位置を制御したいときは、姿勢を含めて(x,y,z,θ,γ,ψ)の6座標を使って表現する.



この章を学ぶ前に必要な知識
ポイント
- ロボットのタスクを表現する上でもっとも自然な座標系で表現される空間
- 物体を移動するタスクなら、二次元座標、剛体を移動するタスクなら姿勢含めて6次元座標、クランク回しでもハンドの位置と姿勢で6次元座標で表現される
- タスク空間で表現される点と対応したコンフィギュレーション空間の点は複数あり一意に定まらない
解 説
タスク空間は、ロボット工学においてタスクを表現する上でもっとも自然な座標系を用いて表現した空間のこと.(我々が考えやすい通常の空間での座標表現)
例えば
・ある軌道でボールを動かしたいときは、(x,y,z)の座標系
・剛体の位置姿勢を制御したいときは、姿勢を含めて(x,y,z,θ,γ,ψ)の座標系
となる.
タスク空間はコンフィギュレーション空間の部分空間です.
以下の図のようにタスク空間に対応するコンフィギュレーション空間の点は複数ありえることがあり、一意に定まるとは限りません.
| タスク空間とは |
コンフィギュレーション空間は、ロボットの内部の状態で表現した空間です. | コンフィギュレーション空間 |
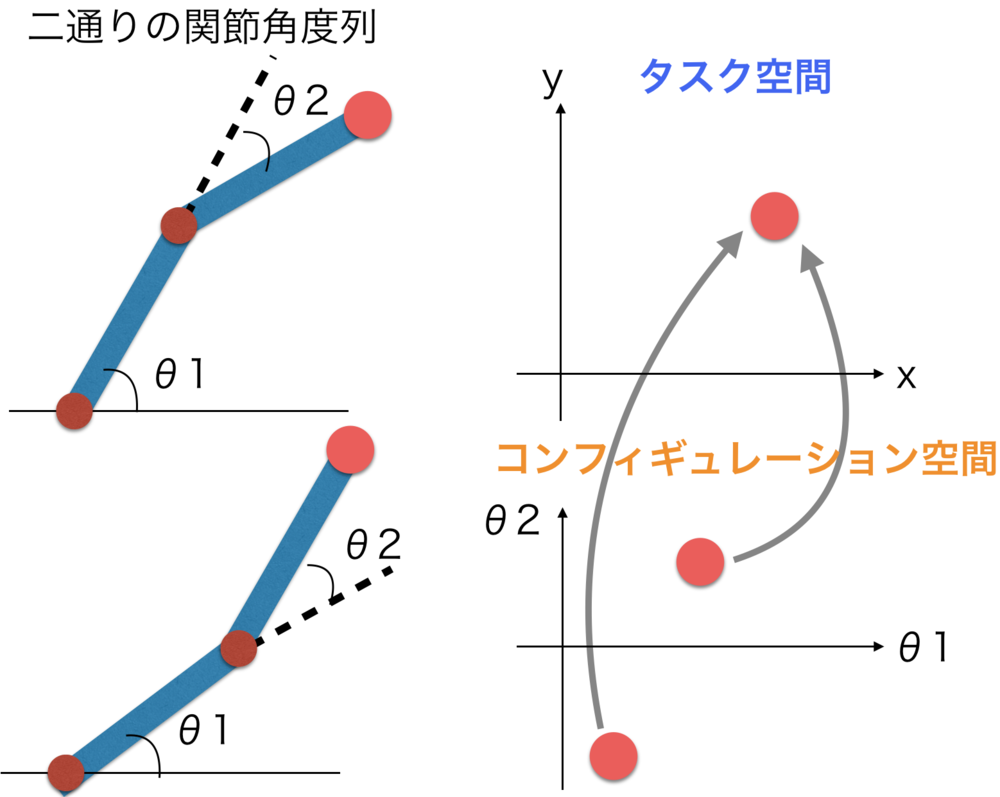 | 二通りの関節角度があるため、
コンフィギュレーション空間の2点がタスク空間の一点に対応している. |
Task空間とWorkSpaceに関する解説動画(英語) |
この章を学んで新たに学べる
Comments
Reasons
知識: コンフィギュレーション空間
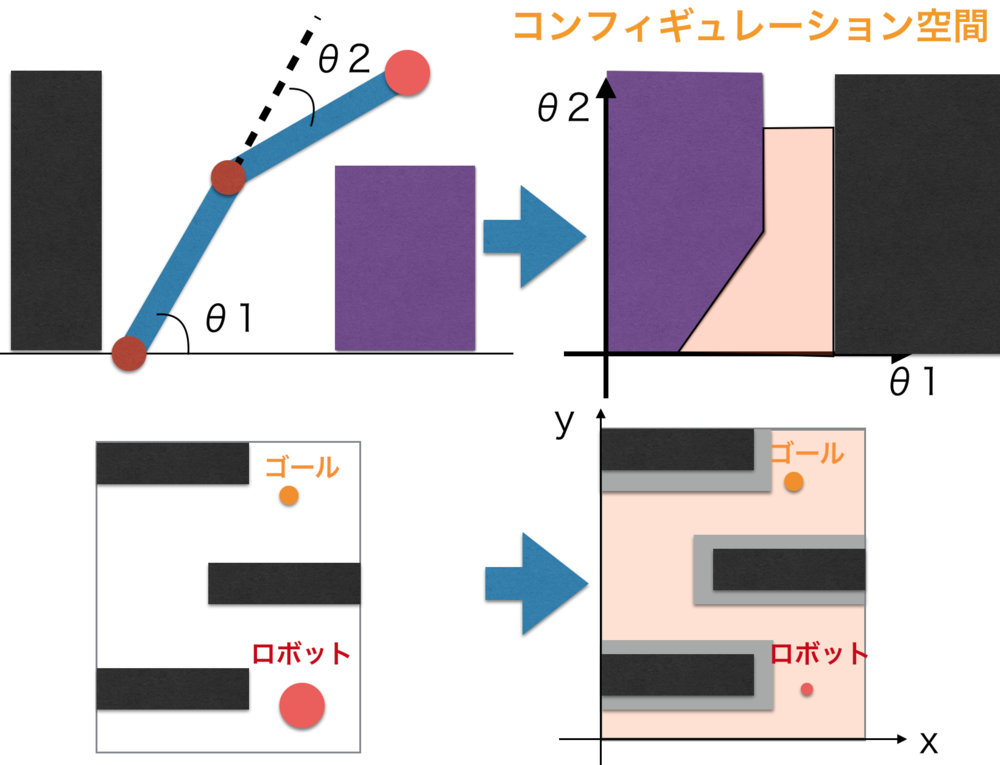
コンフィギュレーション空間(C-Space, Configuration Space)はロボットの経路計画、軌道計画等を考える上でロボットが取りうる姿勢や位置、関節角度等を表現する空間のこと.自由度が高いロボットではコンフィギュレーション空間が高次元になり、計算量が膨大になる.コンフィギュレーションとはロボットのパラメータの値を全て指定したもので、コンフィギュレーション空間はロボットが取りうる全ての値を指す.