-
 @ThothChildren
@ThothChildren
- 2018.10.14
- PV 1079
コンフィギュレーション空間
ー 概要 ー
コンフィギュレーション空間(C-Space, Configuration Space)はロボットの経路計画、軌道計画等を考える上でロボットが取りうる姿勢や位置、関節角度等を表現する空間のこと.自由度が高いロボットではコンフィギュレーション空間が高次元になり、計算量が膨大になる.コンフィギュレーションとはロボットのパラメータの値を全て指定したもので、コンフィギュレーション空間はロボットが取りうる全ての値を指す.



この章を学ぶ前に必要な知識
条件
- ロボット工学におけるコンフィギュレーション空間について
効果
- RRTにおける探索空間とされ、モーションプランニングなどに活用される.
ポイント
- コンフィギュレーションとは、ロボットの全てのパラメータを全て指定したもの(位置、姿勢、関節角度...)
- 現実での障害物をコンフィギュレーション空間の中に表現したものをコンフィギュレーション障害物と呼ぶ
- コンフィギュレーション空間は、ロボットが取りうる全てのコンフィギュレーション(一般化座標で表現されるパラメータ)で構成される空間
- コンフィギュレーションとは、ロボットの運動を表現する全てのパラメータを全て指定したもの(一般化座標.位置、姿勢、関節角度など)
- 一般化座標は、位置や姿勢はもちろん、関節座標でも表現して構わない.
- コンフィギュレーションの次元数は、ロボットの自由度に一致
解 説
コンフィギュレーション空間(C-Space, Configuration Space)はロボットの経路計画、軌道計画等を考える上でロボットが取りうる姿勢や位置、関節角度等を一般化座標として表現する空間のこと.
コンフィギュレーション空間の次元数は、ロボットの自由度と一致するため、関節書くの多く自由度が高いロボット等ではコンフィギュレーション空間が高次元になり、計算量が膨大になってしまう.
コンフィギュレーションとはロボットの一般化座標(パラメータ)の値を全て指定したもので、コンフィギュレーション空間はロボットが取りうる全ての値を指す.ロボットの状態はコンフィギュレーション空間の点と対応する. | コンフィギュレーション空間とは |
| コンフィギュレーションの例 |
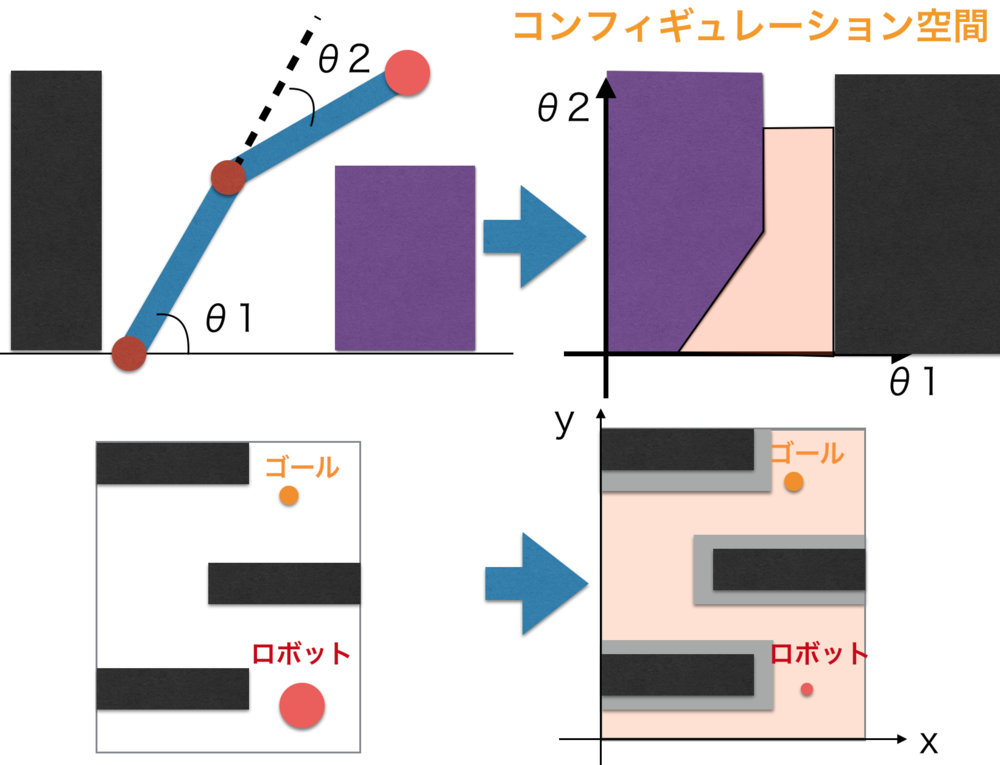
上記の図を用いて説明を行う.
上側の2関節のマニピュレータにおいては、θ1とθ2を使ってロボットのアームの状態が決まる.これらの関節角度を一般化座標としてロボットの状態を表現できるので、
その角度を座標としたコンフィギュレーション空間を考える.
このコンフィギュレーション空間に、実際の空間での障害物も書き込む.
障害物によって設定できない関節角度が存在するため、それらはコンフィギュレーション空間においてコンフィギュレーション障害物(Configuration Obstacle)と呼ばれる.それが上図のコンフィギュレーション空間の紫の領域と黒の領域である. | コンフィギュレーションの例の上側解説 |
下の例では、ロボットがあるゴールまで動くパスを考える問題.
しかし、ロボットの大きさがあるとそれを考慮したパスを考えなくてはならない.
そこで、これをコンフィギュレーション空間で考え、一般化座標であるx,yで座標系を使って、右図のようにする.
灰色の部分はロボットの中心x,yが取ることができない場所である.
このようにコンフィギュレーション空間に置き換えることで、ロボットを点として表現することができるようになり、簡単になることがある. | コンフィギュレーションの例の下側解説 |
この章を学んで新たに学べる
Comments