Thoth Children
ログイン
知識投稿
他サービス
Thothnator
Thoth Coworker
ウジャトで理解する学問
You Only Search Once(β)
Thoth Hieroglyph
ヒエログリフ変換
点群処理
編集
深度センサによって取得されたような3次元点群に対して特定の目的のために点群を処理する方法についてまとめているページです.点群から抽象度の高い情報を取り出す方法や点群から点を探索する方法など様々な手法についてまとめています.
編集
2018.12.16
100
Views
0
Watch
1
Knows
Watch登録
新分野登録
削除申請
一つ上へ
点群位置合わせ
複数の3次元点群同士を位置合わせさせる手法についてまとめています.ロボットが空間を認識するためなどに用いられます.
×
新しい分野を追加
×
新しい知識を追加
×
分野の削除申請
×
移動または削除を行うには理由を申請ください。
理由
他の分野の移動の場合は分野を設定してください。 削除要請される場合はそのまま下のボタンを押下してください.
分野:
学問
技術
言語
高校
中学
一般
物性
道具
思考
計算
アルゴ
その他
分野の説明を編集
×
分野のタイトルを編集
×
点群処理の新規投稿
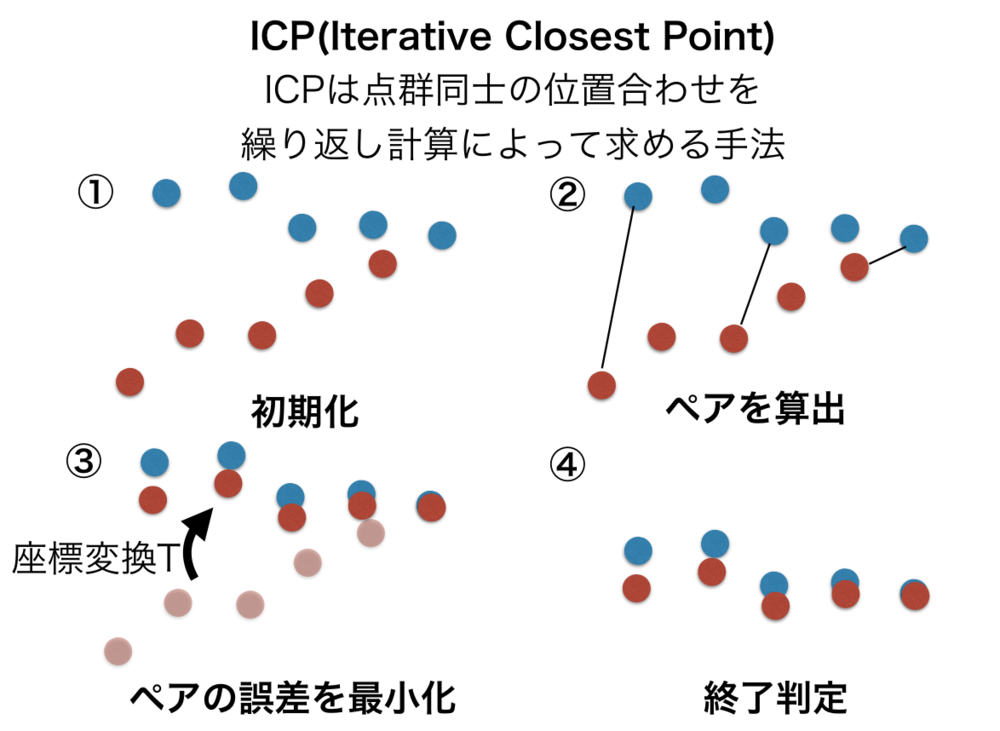
ICPとは
ICP(Iterative closest point)とは、2つの点群同士の位置合わせを繰り返し計算によって実現する手法.位置合わせを行う二つの点群は初期位置が大方あっている必要があります.大きな処理の流れは対応する点同士を見つけその誤差を最小にするように繰り返し変換を行います.
PV
1266
Fav
0
2018.12.16
点群処理人気知識・質問
ICPとは
ICP(Iterative closest point)とは、2つの点群同士の位置合わせを繰り返し計算によって実現する手法.位置合わせを行う二つの点群は初期位置が大方あっている必要があります.大きな処理の流れは対応する点同士を見つけその誤差を最小にするように繰り返し変換を行います.
PV
1266
Fav
0
2018.12.16