ロボットエンドエフェクタの位置制御
ロボットの手先(エンドエフェクタ)の位置制御(Position Control)についてまとめたページです.通常はより安全でタスクを行いやすい力制御を用います.
2018.10.25
-
224Views
-
0Watch
-
2Knows
|
|
ロボットエンドエフェクタの位置制御の新規投稿
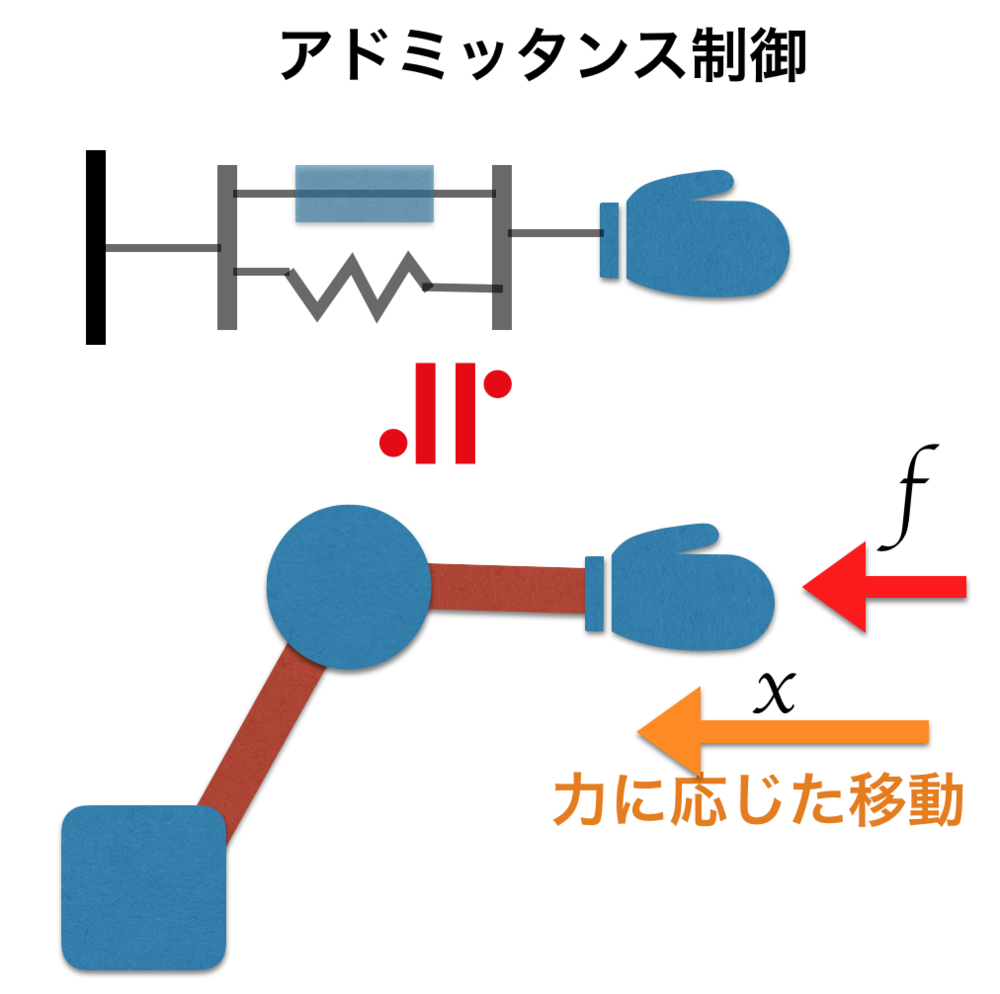
アドミッタンス制御
アドミッタンス制御は、インピーダンス制御の反対で入力された力を元に位置や速度決定する制御手法.人間が外から力を与えるとそれに応じてロボットの手先位置を柔らかく変えていく
PV 3123
Fav 0
2018.10.28
位置制御(エンドエフェクタ)
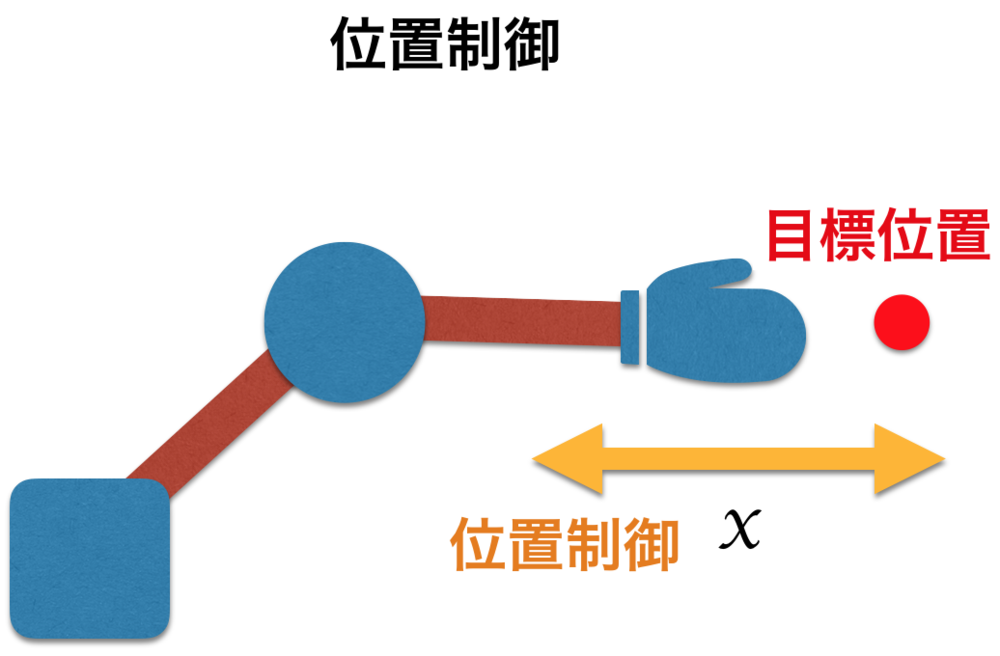
ロボットの手先(エンドエフェクタ)の位置制御(Position Control)は、ロボットの手先に出力すべきトルクや力を指定せずに目標位置に腕を動かすように指令するだけの位置制御.位置しか制御しないため、ロボットが腕を動かすときに気にしているのはロボットの関節角度だけになります.突然の環境変化や障害物に弱く、ロボット自身、環境を損傷する可能性があります.
PV 958
Fav 0
2018.10.25
ロボットエンドエフェクタの位置制御人気知識・質問
アドミッタンス制御
アドミッタンス制御は、インピーダンス制御の反対で入力された力を元に位置や速度決定する制御手法.人間が外から力を与えるとそれに応じてロボットの手先位置を柔らかく変えていく
PV 3123
Fav 0
2018.10.28
位置制御(エンドエフェクタ)
ロボットの手先(エンドエフェクタ)の位置制御(Position Control)は、ロボットの手先に出力すべきトルクや力を指定せずに目標位置に腕を動かすように指令するだけの位置制御.位置しか制御しないため、ロボットが腕を動かすときに気にしているのはロボットの関節角度だけになります.突然の環境変化や障害物に弱く、ロボット自身、環境を損傷する可能性があります.
PV 958
Fav 0
2018.10.25