-
 @ThothChildren
@ThothChildren
- 2018.10.28
- PV 3123
アドミッタンス制御
ー 概要 ー
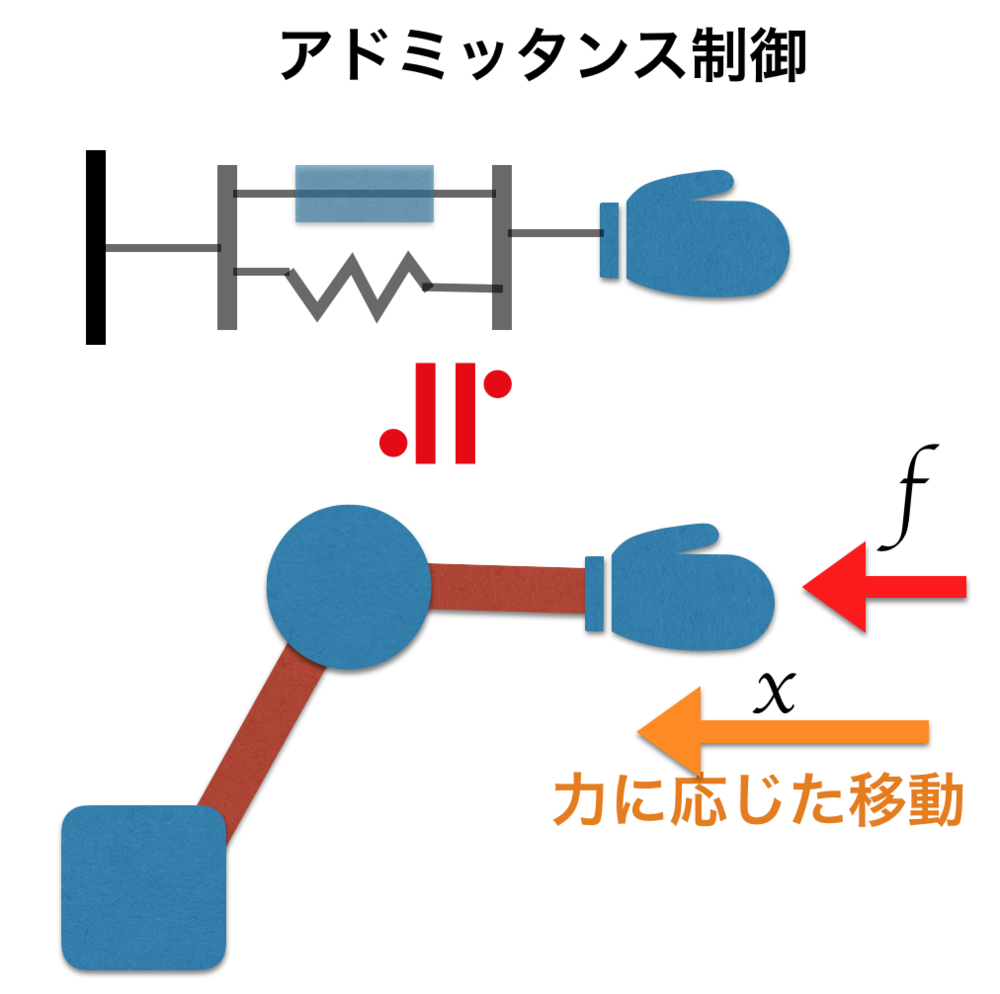
アドミッタンス制御は、インピーダンス制御の反対で入力された力を元に位置や速度決定する制御手法.人間が外から力を与えるとそれに応じてロボットの手先位置を柔らかく変えていく



この章を学ぶ前に必要な知識
条件
- 外部から力を与えられる
- ロボットに力センサが必要
効果
- 外部から与えられる力に応じてエンドエフェクタの位置が柔らかく変化
ポイント
- 位置を元に力を決めるインピーダンス制御とは入出力が逆
- 力センサで測れていない力があると無理な動作になり危険
解 説
アドミッタンス制御は、位置が入力で出力する力を決めていたインピーダンス制御の反対で入力された力を元に位置や速度決定する制御手法.
人間が外から力を与えるとそれに応じて手先目標位置を決め、ロボットの手先位置を"柔らかく"変えていく制御となっている.
そのため人間が安全にロボットの姿勢を決めることができる.
上記のように力が入力となるため、力センサは必要となる.逆に力センサがない部分での接触をロボットは感知できないので危険な動作のまま動くことは避けられない. | アドミッタンス制御とは |
インピーダンス制御は、位置を入力としてそれに応じた力を制御する力制御ベースの制御手法. | インピーダンス制御 |
アドミッタンス制御では、与えられた外力を使って、
$$F = M_d(\ddot{q_d} - \ddot{q}) + B_d(\dot{q_d} - \dot{q}) + K_d(q_d - q)$$
のように記述でき、\(\ddot{q}\)等を求める.
逆動力学より
$$\tau = B(q)\ddot{q} + C(q, \dot{q})\dot{q} + g(q) + f_F(q) + F$$
を求めることでどのようなトルクを与えるかを制御することが可能. | アドミッタンス制御の詳細 |
| アドミッタンス制御の概念図 |
この章を学んで新たに学べる
Comments
Reasons
知識: インピーダンス制御
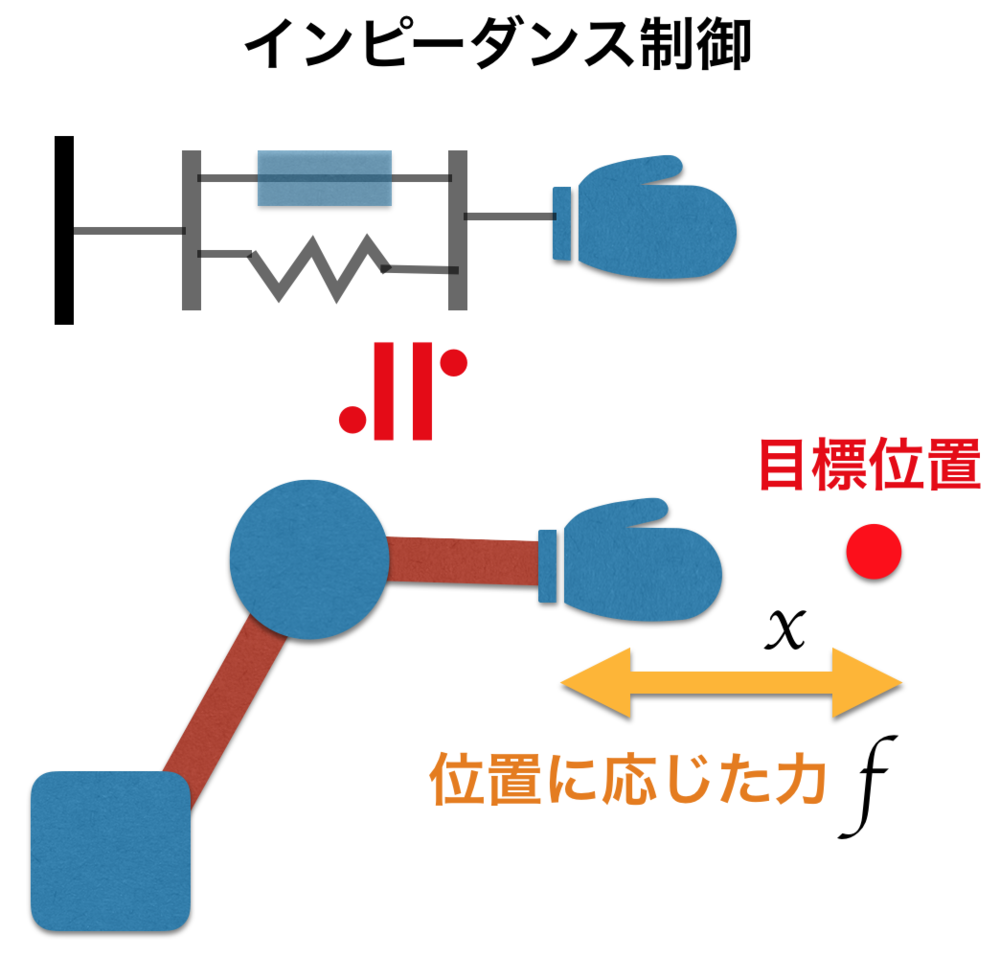
インピーダンス制御はバネマスダンパのモデルを元に仮想物体を想定してインピーダンスを制御する制御方法.力を特定の値に修正をするのみの直接力制御とは異なる間接力制御.外からの力の変化に対して緩やかに変化をする.接触制御.