-
 @ThothChildren
@ThothChildren
- 2018.11.7
- PV 619
ばねカム重力補償機構
ー 概要 ー
ばねカム重力補償機構は、ロボットアームの重力を相殺するためにばねとカム機構を用いることで重力補償を実現する機構のこと.適切に設計することでばねの伸びによって弾性力が決まるのを調整することができ、一定の補償力を出力できる.



この章を学ぶ前に必要な知識
効果
- ロボットアームの重力を相殺する機構を実現
- 変化するアーム姿勢・角度に追従する重力補償を行える
ポイント
- カムの形状を工夫することでアームの回転角度とばねの伸びの関係を調整
- アームの重量などが変化した場合は釣り合わなくなる
- ワイヤーやベルトを使用しないので剛性の心配ない
解 説
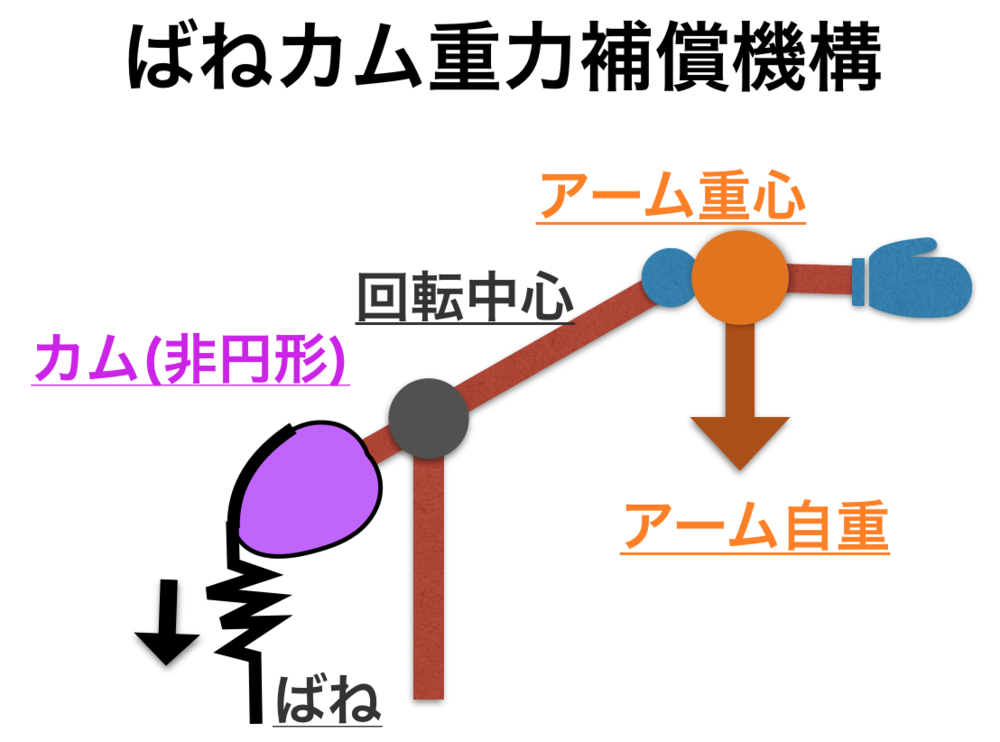
ばねカム重力補償機構は、ロボットアームの重力を相殺するためにばねとカム機構を用いることで重力補償を実現する機構のこと.
アームの回転角度によってばねの張力が非線形に変化してしまって扱いにくいばねの弾性力を、カムを適切に設計することで調整することができ、アームの角度が変わっても一定の補償力を出力できる.
アームの重量や姿勢が大きく変わると重力補償を完全にはできないのは他手法と同じ.
プーリーなどを使用し他場合に必要な剛性の低いワイヤーなどを使用しないでよいのはメリット. | ばねカム重力補償機構とは |
| カム重力補償機構の概念図.
噛むの形状によってアームの傾きがどのようにバネの伸びに反映されるかが異なる. |
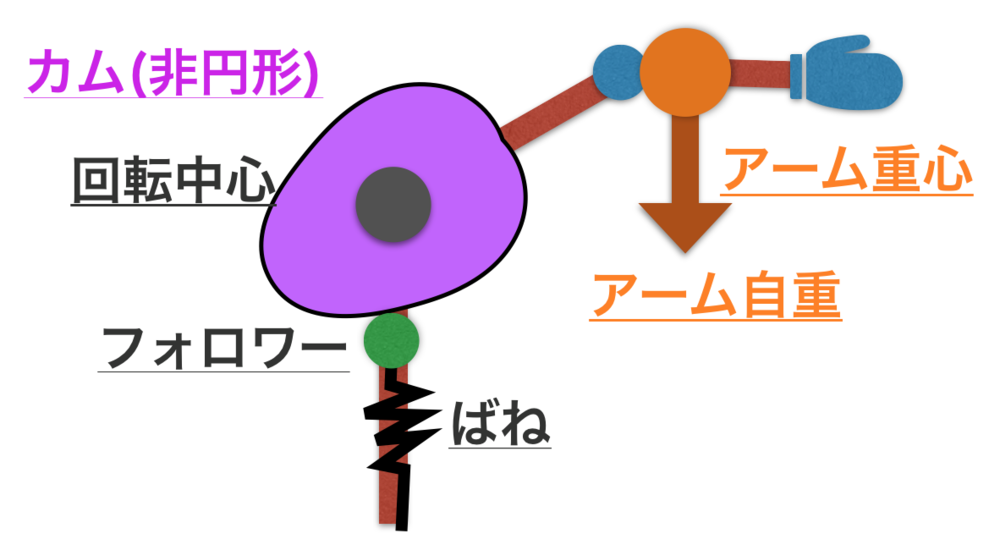 | カム機構+フォロワーの場合は左のような設計も可能 |
この章を学んで新たに学べる
Comments