-
 @ThothChildren
@ThothChildren
- 2018.11.7
- PV 762
ばねリンク重力補償機構
ー 概要 ー
ばねリンク重力補償機構は、バネを用いて重力補償をハードで実現する機構.通常バネだけで重力補償するのは難しいため、他の方法によって釣り合うように調整する.カウンタウェイトのように重くならず、エネルギー効率がよく、非常時にもバネが突然の落下を防いでくれる点などが好まれる.



この章を学ぶ前に必要な知識
効果
- 重りなしに自身のロボットアームの重力補償が実現できる
- バネの弾性力によってアームの重力補償
ポイント
- バネの方向は決まっておりロボットアームの回転方向が制限される
- バネがあるため可動域が制限される
- カウンタウェイトより軽く済ませられる
- 伸びではなくバネ長さに比例した弾性力を出すバネ(zero length spring)なら調整がしやすい
- ロボットアームの姿勢によって釣り合う位置がが保たれない
解 説
ばねリンク重力補償機構は、バネを用いて重力補償をハードで実現する機構.通常バネだけで重力補償するのは難しいため、他の方法によって釣り合うように調整する.
カウンタウェイトのようにロボット重量が全体としてあまり重くならず、エネルギー効率がよく、非常時にもバネが突然の落下を防いでくれる点などが好まれる.
ただバネの方向による制限や可動域の制限がかかることなどが欠点としてあげられる. | ばねリンク重力補償機構とは |
重りによる重力補償と比べてバネによる方が、重さが軽くなる. | カウンタウェイト重力補償機構 |
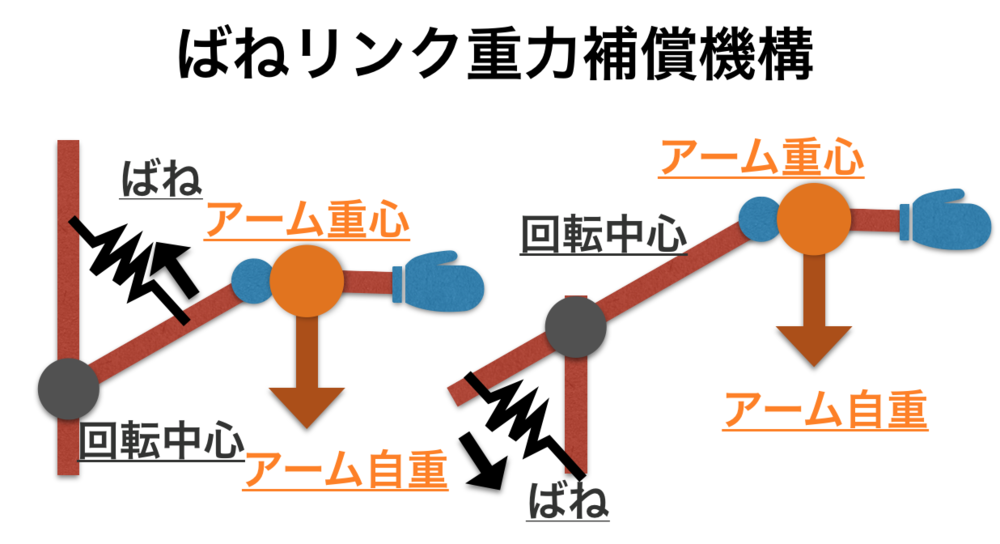
| ばねリンク重力補償機構の概念図
取り付け方の異なる二種類の機構 |
上記の左側の図において、"バネの伸びでなくばねの長さに比例するバネ(zero length spring)"を用いた場合の釣り合いを示す.
\(k_{S}\)はバネ定数,\(l_{SBane}\)はばねの長さ,\(l_{SArm}\)はバネ側の回転中心までの長さ,\(m_{Arm}\)はロボットアームの質量,\(l_{Arm}\)はロボットアームの重心と回転中心までの距離 とすると、
$$k_{S} l_{SBane}l_{SArm} = m_{Arm} g l_{Arm}$$
の釣り合いが得られる.
これは角度に依存しない釣り合いになっているため、常に一定の重力補償力が得られることがわかる. | バネの伸びでなくばねの長さに比例するバネを用いたときの釣り合い |
この章を学んで新たに学べる
Comments
Reasons
知識: カウンタウェイト重力補償機構
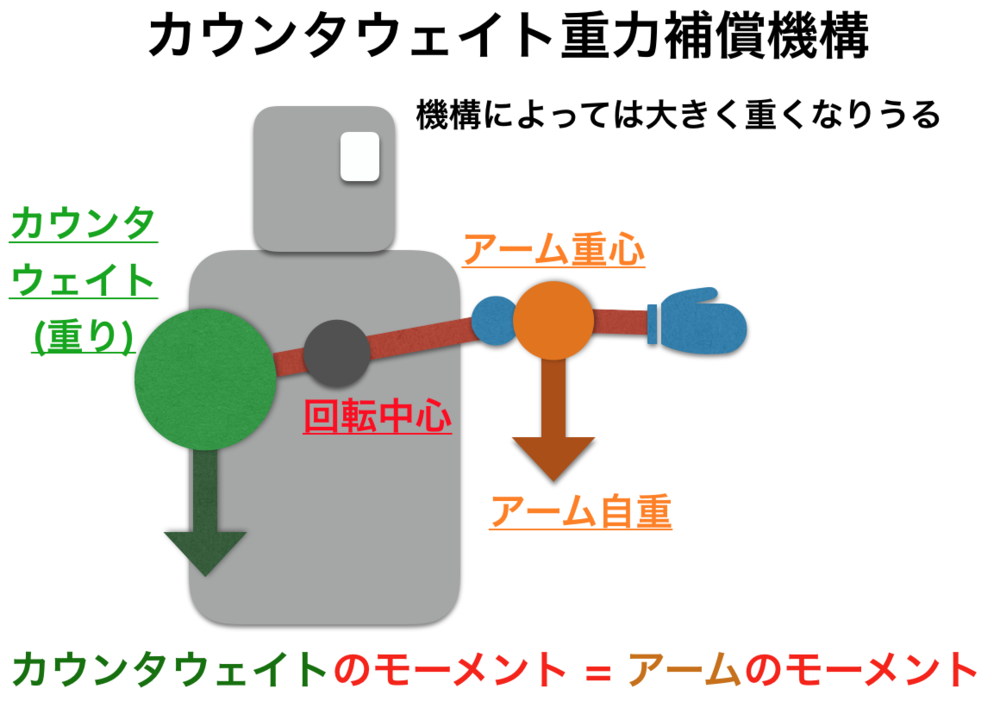
カウンタウェイト重力補償機構は、ロボットアームの自重を相殺するような重りをあらかじめアームの反対側に備えることで機構的に重力補償をしトルクを抑えるアーム機構.アームの変形などではバランスが取れずまたロボット全体の重量が増えるなどあり、アーム根元のみに取り付けることが一般的.