-
 @ThothChildren
@ThothChildren
- 2018.7.16
- PV 273
モラベックコーナー検出器
ー 概要 ー
モラベックコーナー検出器は、小さな領域を微小に動かしたときにその中の画素がどの程度変わるかをスコアリングすることでコーナーを検出手法.ハリスコーナー検出はこの手法を改良したものである.



この章を学ぶ前に必要な知識
条件
- 画像を入力
効果
- コーナーを検出
ポイント
- スパイクノイズも検出してしまう
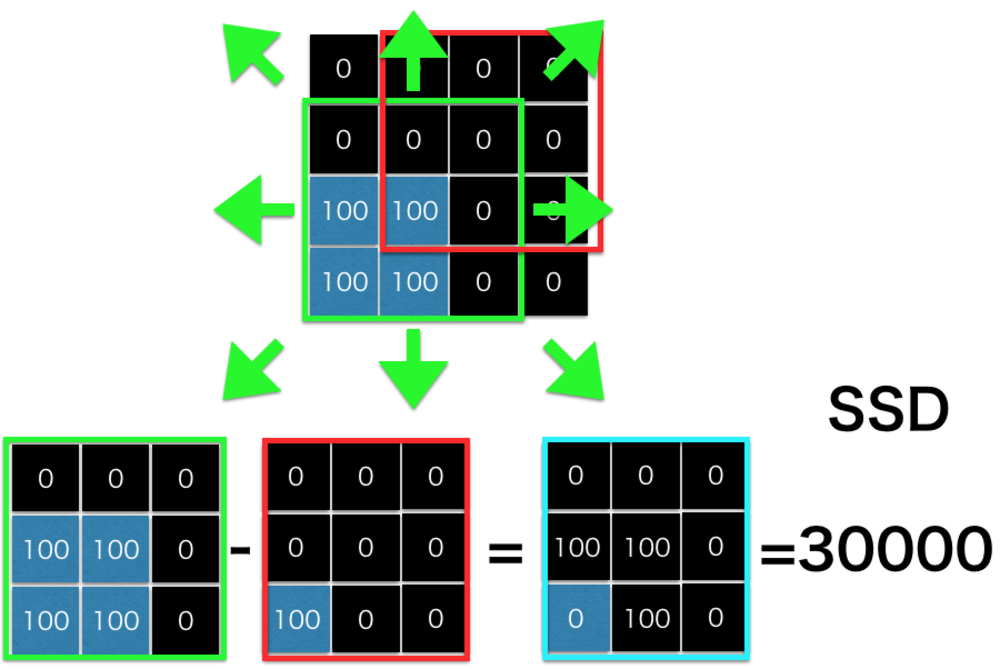
- 8方向に領域を移動した際に、各方向で最も画素値の差分のSSDが低い値をスコアとする
- 近傍エッジと異なる方向のエッジがある場合は検出されない
解 説
モラベックコーナー検出器は、小領域(サイズは3x3~7x7等)を8方向に微小に動かしたときにその中の画素がどの程度変化するかをスコアリングすることで、コーナーを検出手法.
ハリスコーナー検出はこの手法を改良したものである.
微小に動かしたときの変化スコアは以下のように、全画素の差分でSSDを計算したときの8方向の中での最小値を採用する. | モラベックコーナー検出器 |
まずある方向に移動した際のスコアは例えば3x3のときに以下のように計算する
$$V_{u,v}(x,y) = \sum_{p=-1}^{1} \sum_{q=-1}^{1}(I(x+u+p, y+v+q)- I(x +p, y+q))^2 $$
\(u,v,\)は移動シフト量を示す.
そして、これを8方向で行った際の最小の値をスコアとする
$$Score(x,y) = \min_{u,v} (V_{u,v}(x,y ))$$ | モラベックコーナー検出器のスコアリング |
| モラベックコーナー検出の計算概念図 |
この章を学んで新たに学べる
Comments