- @aramitama
- 2018.3.22
- PV 371
点群処理をライブラリを使って実装する
ー 概要 ー
点群処理をライブラリを使って実装する方法についてまとめます。点群処理として最も有名なライブラリの一つはPointCloudLibrary.



この章を学ぶ前に必要な知識
条件
- センサ又はファイルから点群を入力にするプログラム
効果
- 点群処理をするプログラムを記述
ポイント
- 最も有名なライブラリのPointCloudLibrary(PCL)を紹介
解 説
センサから得られる点群やファイルを入力に点群処理を実装するとき、
デファクトスタンダードであるPointCloudLibraryをライブラリとして使用することがお勧めです。 | 外部リンク PCLのプロジェクトページ |
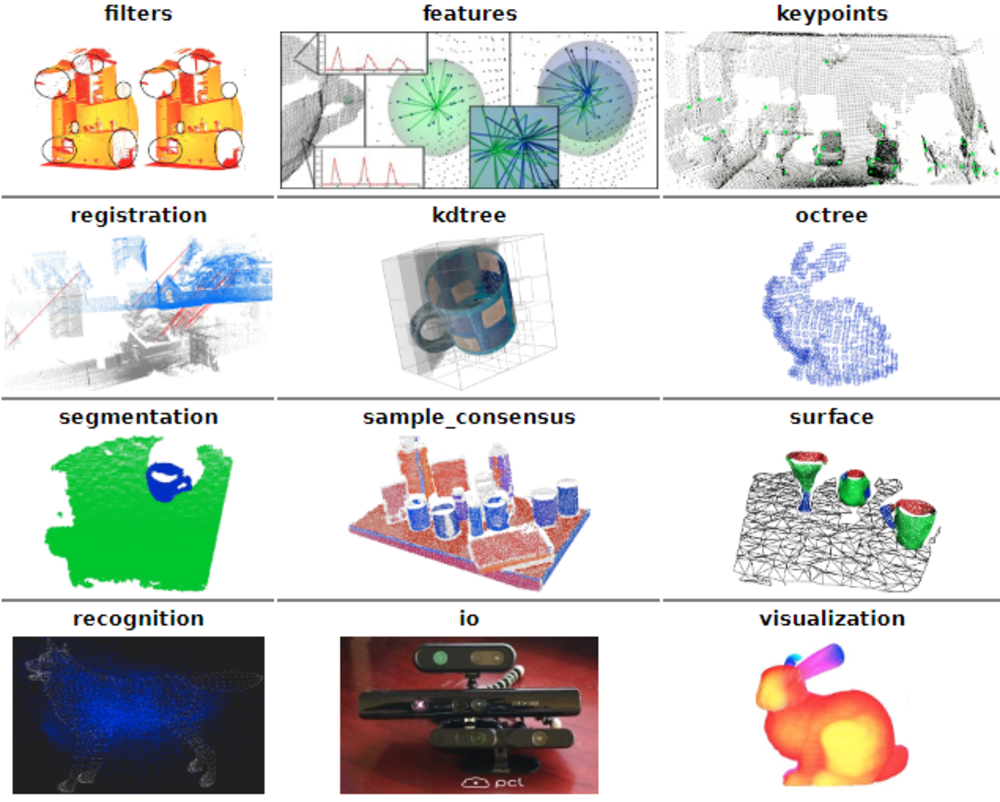
| PCLにおける
大カテゴリによる分類 |
PCLの主なモジュールに関して簡単に説明します.
・Filters
点群の余分な点を除去したりする。フィルタのモジュール。
・Features
点群から3次元特徴量を抽出するモジュール。
・Keypoints
点群同士のキーポイントを抽出するモジュール。
・Registration
点群同士の位置合わせ。点群の対応付けのモジュール。
・Kdtree
近傍探索や効率的な距離検索をするためのモジュール。
・octree
近傍探索や効率的な距離検索をするためのモジュール。検索、占有、ダウンサンプリング、空間の分割等が可能。
・segmentation
点群の余分な点を除去したりする。フィルタのモジュール。
・sample_consensus
点群の中からプリミティブな形状を見つけたりするモジュール。
・surface
点群から表面の3Dモデルを作成するモジュール。
・recognition
点群の物体認識するモジュール。
・io
点群をセンサから入力することやファイル読み書きするためのモジュール。
・visualization
点群を可視化するためのモジュール | PCLの主なモジュールの概要 |
PCLのgithubリンクを貼っておきます。
基本的にexamplesフォルダにコードの使用例があるので、参考にしながらプログラムを書くことができます。 | 外部リンク PCL(github.com) |
PCLのTutorialのリンクはこちらです。
ソースコード含めた資料があるので、実装時に参考になります。 | 外部リンク PCL Tutorial |
この章を学んで新たに学べる
Comments